运维
云原生
机器人
kinect
电路
cdh
随身wifi
batch
多继承和菱形虚拟继承
树莓派
时间尺度
mount
cisp证书
pytorch配置GPU版本
环境搭建
EmberZnet
群晖
环境变量
微信扫码登录
multisim
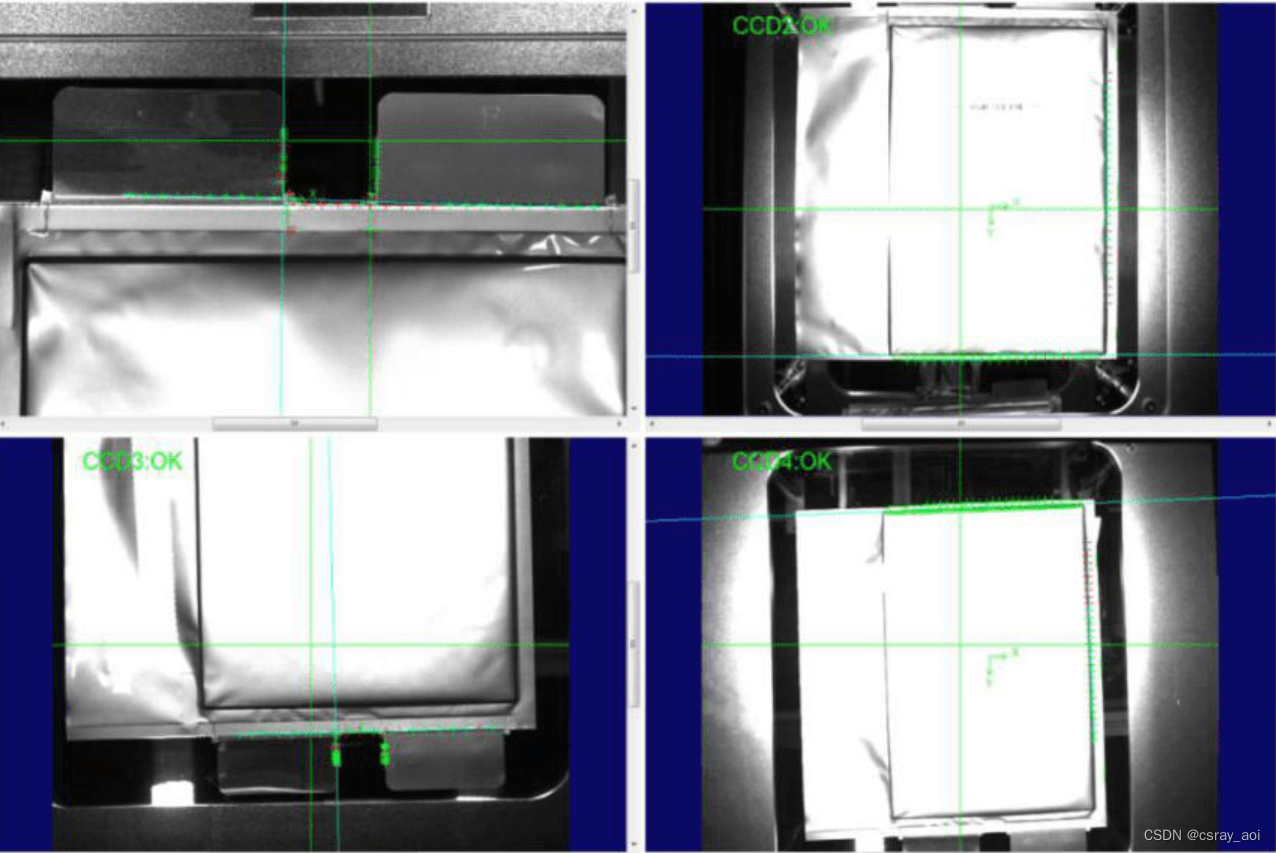
视觉检测
2024/4/11 15:17:14
机器视觉工程师们,我是低学历我是如何应对?
(QQ群有答疑)零基础小白快速上手海康VisionMaster开发系列课程r 我觉得机器视觉工程师分为有四种。 1.学历高,学习 2.学历低,学习 3.学历高,不学习 4.学历低,不学习 “学历高,学习” 与 “学历低,学习”这两类人是少数, 这两类人都能获得很好的发展,成功者比比皆是,…
Baumer工业相机堡盟工业相机如何通过BGAPISDK将图像放大缩小显示(C#)
Baumer工业相机堡盟工业相机如何通过BGAPISDK将图像放大缩小显示(C#) Baumer工业相机Baumer工业相机BGAPISDK和图像放大缩小的技术背景Baumer工业相机通过BGAPISDK将相机图像图像放大缩小功能1.引用合适的类文件2.通过BGAPISDK将相机图像图像放大缩小功能…

Baumer工业相机堡盟相机如何使用NEOAPI SDK实现相机的连接(C++)
Baumer工业相机堡盟相机如何使用NEOAPI SDK实现相机的连接(C) Baumer工业相机Baumer工业相机SDK技术背景代码分析第一步:先使用NEOAPI函数查找相机第二步:连接相机后对相机进行采图第三步:将采集的图像显示在UI界面上 …
【issue-halcon例程学习】forest.hdev
例程功能 从红外图像中提取森林特征。
代码如下
dev_close_window ()
dev_update_window (off)
read_image (Forest, forest_air1)
get_image_size (Forest, Width, Height)
dev_open_window (0, 0, Width, Height, black, WindowHandle)
decompose3 (Forest, Red, Green, Bl…

机器视觉工程师,我们上班的意义在哪里?
很多朋友,现在不是自己想做的工作,那你做这份工作干什么?担心自己没有竞争力,担心自己被替代。上班的意义是完成自己头脑和资源的原始积累,迈向下一级人生游戏;我最终要靠自己本事吃饭,而不是一直待在这个只…

AOI与AVI:在视觉检测中的不同点和相似点
AOI(关注区域)和AVI(视觉感兴趣区域)是视觉检测中常用的两个概念,主要用于识别和分析图像或视频中的特定区域。虽然这两个概念都涉及到注视行为和注意力分配,但它们在定义和实际应用等方面有一些差异。 AOI…
linux下 u2net tensorrt模型部署
TensorRT系列之 Windows10下yolov8 tensorrt模型加速部署 TensorRT系列之 Linux下 yolov8 tensorrt模型加速部署 TensorRT系列之 Linux下 yolov7 tensorrt模型加速部署 TensorRT系列之 Linux下 yolov6 tensorrt模型加速部署 TensorRT系列之 Linux下 yolov5 tensorrt模型加速…

机器视觉工程师为什么要反复调试?
目录 那么程序debug原因有哪些?图像处理debug的原因有哪些? 我们机器视觉项目的程序包含,业务逻辑图像处理,所以我们不单单调试图像处理部分,还要调试C#,界面,数据等等。我们必须保证程序稳定性…
海康visionmaster-VM 嵌入:嵌入用户软件界面的方法
描述 环境:VM4.0.0 VS2015 及以上 现象:将 VM 整体嵌入到客户软件界面中? 解答 将 VM 软件整体嵌入到客户软件中,需要利用 Panel 控件,并且需要先启动 VM 软件,具 体代码如下: C# [DllImport(“…
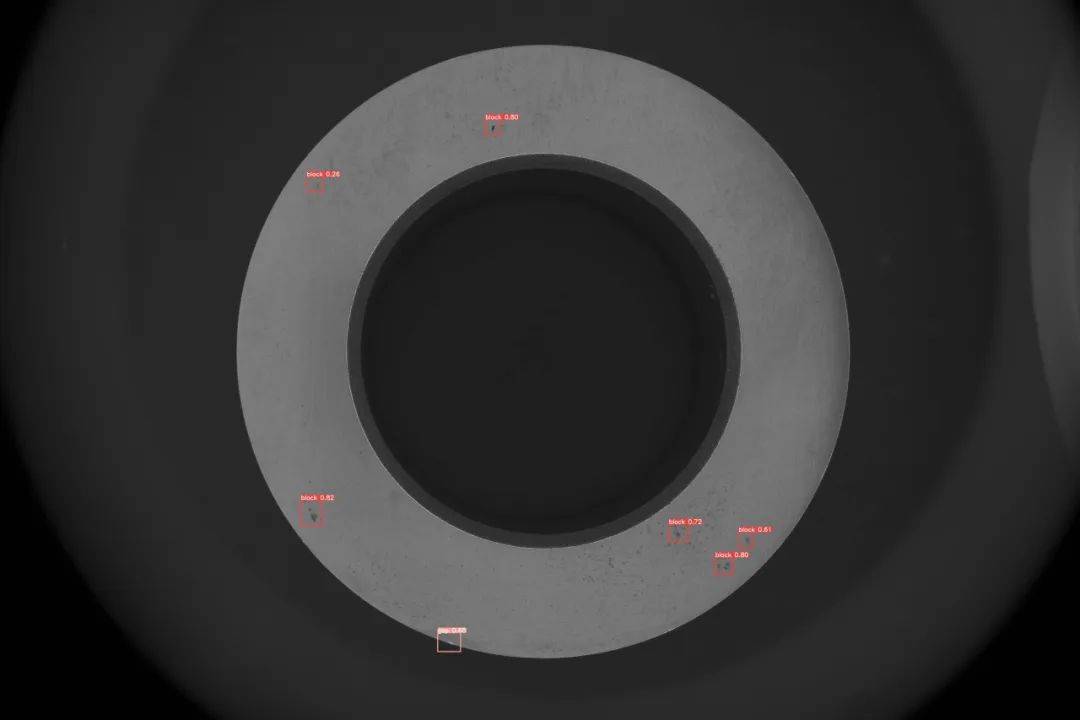
机器视觉系统在汽车车轮毂检测上的应用
将机器视觉用于轮毂检测,可以利用图像分析的方法来测量轮毂特征尺寸、判断轮毂形状,并获取其位置坐标等信息,从而能够辨识流水生产线上的各种款式和型号的汽车轮毂。 市面上对汽车车轮毂具体检测要求如下 :
1.为了分辨流水线上…
Baumer工业相机堡盟工业相机如何使用OpenCV实现相机图像的显示(C#)
Baumer工业相机堡盟工业相机如何使用OpenCV实现相机图像的显示(C#) Baumer工业相机Baumer工业相机的图像转换为OpenCV的Mat图像的技术背景在NEOAPI SDK里使用OpenCV实现相机图像的显示联合OpenCV实现相机图像的显示测试演示图 工业相机通过使用OpenCV实现…

明明用的不是自己机器视觉软件,甚至是盗版,机器视觉公司为什么还要申请那么多专利?
我首先看下专利是什么?
专利分为发明、实用新型、外观设计三种类型。
发明是指对产品、方法或者其改进所提出的新的技术方案。
实用新型是指对产品的形状构造或者其结合所提出的适于实用的新的技术方案。一般对日用品、机械、电器等产品的简单改进比较适用于申请…

损失函数总结及pytorch示例
损失函数
一句话:损失函数就是计算预测值和真实值之间的误差。
损失函数可以分为以下三类:
回归损失函数:应用于预测连续的值,如房价,年龄等分类损失函数:用于离散的值,图像分类,…
改进模型速度/精度的工程方法
提速部分
1. 针对感受野的不同,划分大小目标检测网络 同样的任务,可以训练多套网络实现不同感受野,分别处理大目标、小目标。为了检测多尺度目标,模型都会采用类FPN的结果,直接结果就是减少模型的并发性。划分大小网络…
计算机视觉之Focus层
由于博主最近在写论文,刚好用到了Focus层,特来总结
1. 深度学习有哪些下采样的方式?
池化操作,1.最大池化 2.平均池化步长大于1的卷积还有Focus层
总结一下:
最大池化是突出目标特征和边缘细节,而平均池…

Baumer工业相机堡盟工业相机如何联合NEOAPI SDK和OpenCV实现相机图像转换为Mat图像格式(C++)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK实现相机掉线自动重连(C) Baumer工业相机Baumer工业相机的图像转换为OpenCV的Mat图像的技术背景在NEOAPI SDK里实现相机图像转换为Mat图像格式联合OpenCV实现相机图像转换为Mat图像格式测试演示图 工业相机…

江湖再见,机器视觉兄弟们,我已经提离职了,聪明的机器视觉工程师,离职不亏本!
我闻江湖已叹息,又闻人间繁闹闹。同为布衣沦落人,相逢何必曾相识。 此生谁料事事休,道不尽人情冷暖,聚散离合总平常,不似勇气少年时。 我估计今年公司年底是发不出工资了,因为订单续不上。年终奖更是没有&…

免费照片转绘画风格软件-FotoSketcher
FotoSketcher一款免费照片转绘画风格软件,只需点击几下鼠标即可自动将照片转换为艺术作品。支持从铅笔素描到水彩画或油画、钢笔画、墨水画、抽象艺术和卡通画,有 20 多种不同的风格可供选择,工具还可以修改原始照片增强对比度、锐化、简化图…
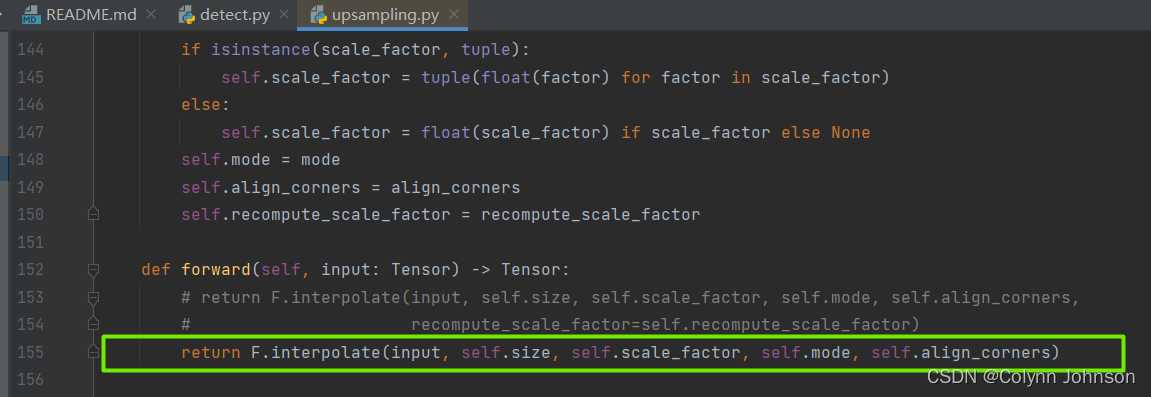
【已解决】AttributeError: ‘Upsample‘ object has no attribute ‘recompute_scale_factor’
项目yolo v5中,终端执行detect.py文件时出现AttributeError属性报错,解决如下:
1 光标定位Upsampling.py,点击报错跳转 2 如行154示,直接删除or注释, recompute_scale_factorself.recompute_scale_factor …

机器视觉系统选型-参数-镜头各个参数之间相互关系
焦距越小,景深越大;焦距越小,畸变越大; 光圈越大,图像亮度越高;光圈越大,景深越小; 光圈越大,分辨率越高; 一般像场中心较边缘分辨率高,像场中心较…
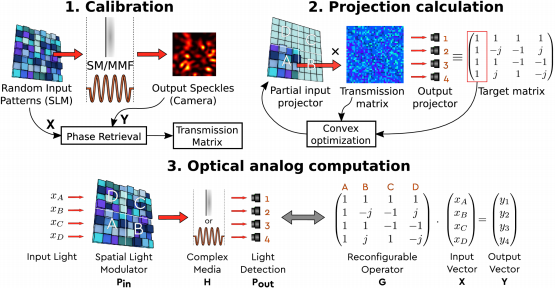
【干货】散射光场调控方法及应用
摘要:散射是一种在自然界中普遍存在的现象,散射光场调控的研究在光学成像、光通信、非线性光学、量子光学、生物医疗等领域具有极其重要的科学意义和应用价值。波前整形方法可以改变入射光的相位模式分布来补偿由于散射引起的相位畸变,使得散…
AI:103-基于深度学习的海上牧场鱼群识别技术
🚀点击这里可直接跳转到本专栏,可查阅顶置最新的指南宝典~ 🎉🎊🎉 你的技术旅程将在这里启航! 从基础到实践,深入学习。无论你是初学者还是经验丰富的老手,对于本专栏案例和项目实践都有参考学习意义。 ✨✨✨ 每一个案例都附带有在本地跑过的代码,详细讲解供大…

不做机器视觉工程师,转行,转岗的建议与想法
正所谓外行看热闹,内行看门道。提前咨询前辈们,多问问,多看看。要做就做,一定要提前做好防范。
无论你是要转行或者是转岗,看你有没有本钱和试错成本 有些人,家庭好,可以一直去试错和从头再来。…
从传统到智能:机器视觉检测赋能PCB行业数字化转型!
PCB板在现代电子设备中是一个重要的组成部分,它是用来集成各种电子元器件的信息载体。在电子领域中,PCB板有着广泛的应用,而它的质量直接影响到产品的性能。随着电子科技技术和电子制造业的发展,贴片元器件的体积 变小,…
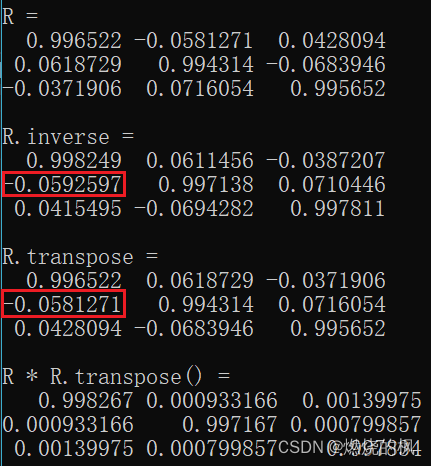
基于Eigen的位姿转换
位姿中姿态的表示形式有很多种,比如:旋转矩阵、四元数、欧拉角、旋转向量等等。这里基于Eigen实现四种数学形式的相互转换功能。本文利用Eigen实现上述四种形式的相互转换。我这里给出一个SE3(4*4)(先平移、再旋转)的构建方法&…

如何使用计算机视觉检测钓鱼攻击?
无论你是喜欢、还是厌恶、亦或害怕,以ChatGPT为代表的新兴人工智能(AI)平台,目前正在更加深入地迈向公共领域。它们不仅表现为各种聪明的聊天机器人,而且能够在幕后以多种创新方式被广泛使用。其中,最为典型…
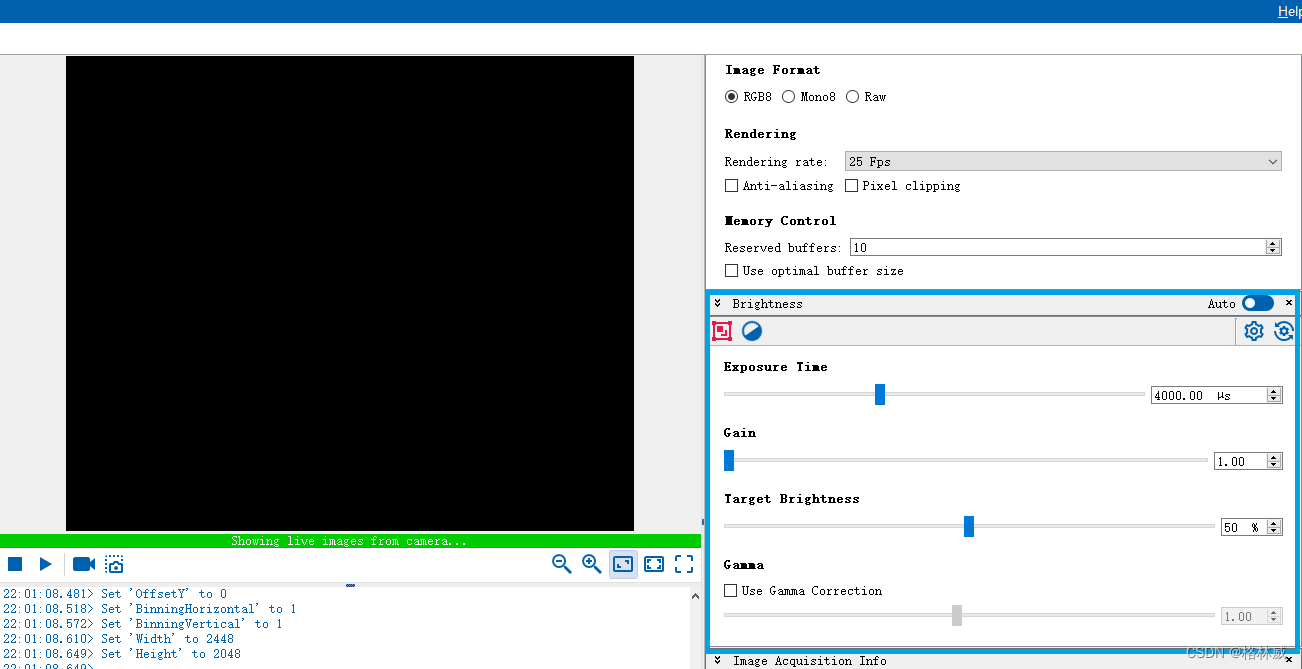
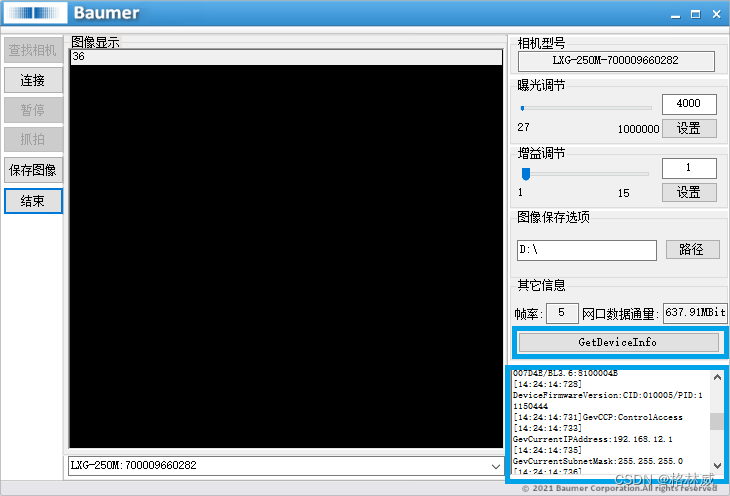
Baumer工业相机中曝光与增益两种功能的优点和作用以及使用方法
项目场景
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计数和识别、运动分析和图像处理。
Baumer的万兆网相机拥有出色的图像处理性能,可以实时传输高分辨率图像。此外,该相机还具有…
<sa8650>sa8650 CDT-之-针对SA8650 LeMans芯片组SP的快速指南
<sa8650>sa8650 CDT-之-针对SA8650 LeMans芯片组SP的快速指南 1 前言2 CDT的更详细信息3 需要由板中的自定义CDT处理的依赖关系。<sa8650>sa8650 CDT-之-汽车CDT配置用户指南(上) <sa8650>sa8650 CDT-之-汽车CDT配置用户指南(下) <sa8650>sa8650 CDT-之-针对SA8650…
C#(Csharp)我的基础教程(一)(我的菜鸟教程笔记)-构造方法探究与学习
目录 核心:构造方法(析构方法)、实例方法/静态方法1、构造方法(Constructor):2、构造方法的重载3、构造方法之间的调用4、静态方法 核心:构造方法(析构方法)、实例方法/静…

论坛现场回顾:维视教育的新工科人才培养 「最佳实践 」
全国高校电子信息类专业教学论坛隆重召开 由教育部高等学校电子信息类专业教学指导委员会主办,苏州大学、清华大学出版社承办的“全国高校电子信息类专业教学论坛”于2023年4月14日-16日在江苏省苏州市隆重开幕,维视教育作为电子信息类教学指导委员会战略…
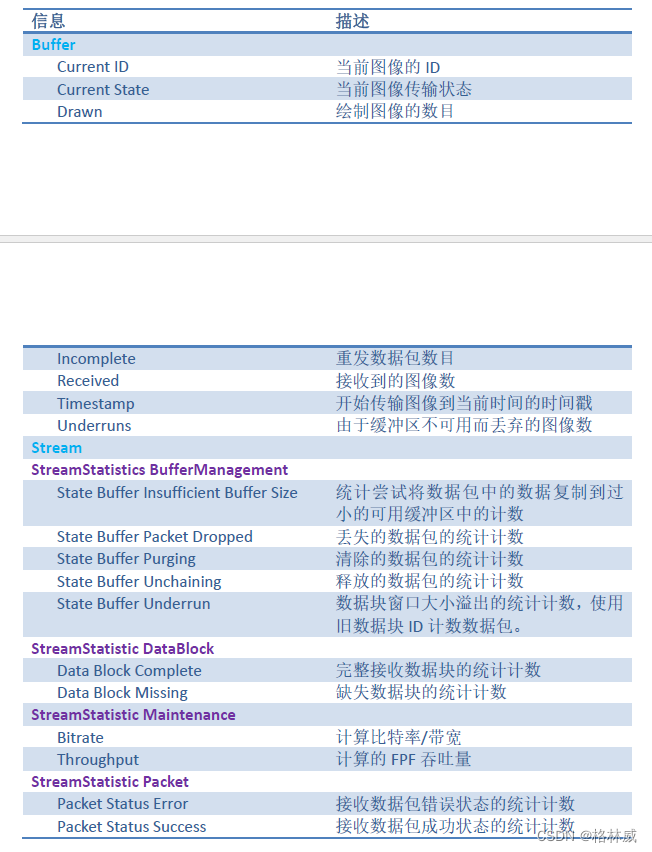
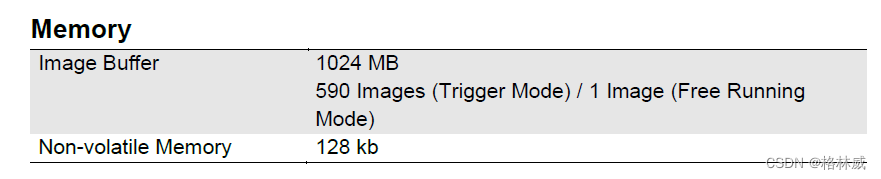
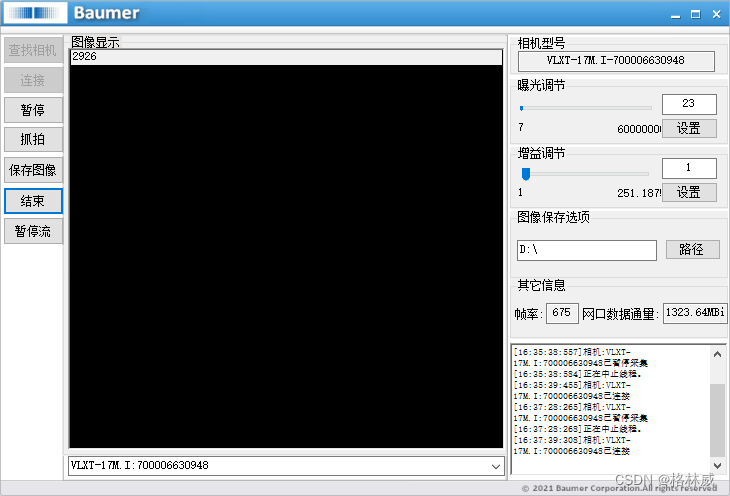
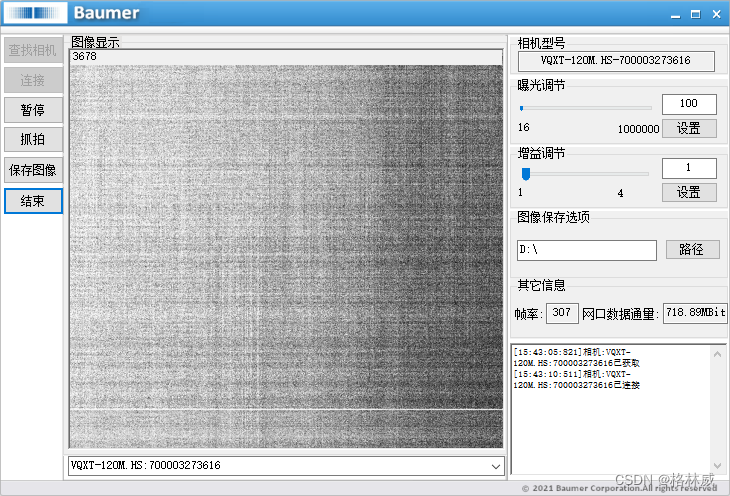
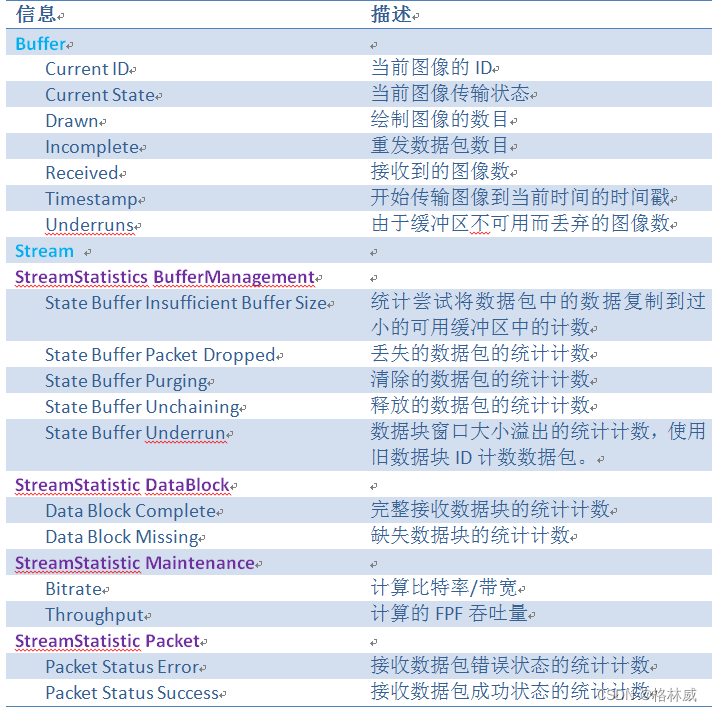
Baumer工业相机堡盟相机如何使用CameraExplorer查看相机图像Buffer以及图像数据传输流统计信息
项目场景
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计数和识别、运动分析和图像处理。
Baumer的万兆网相机拥有出色的图像处理性能,可以实时传输高分辨率图像。此外,该相机还具…

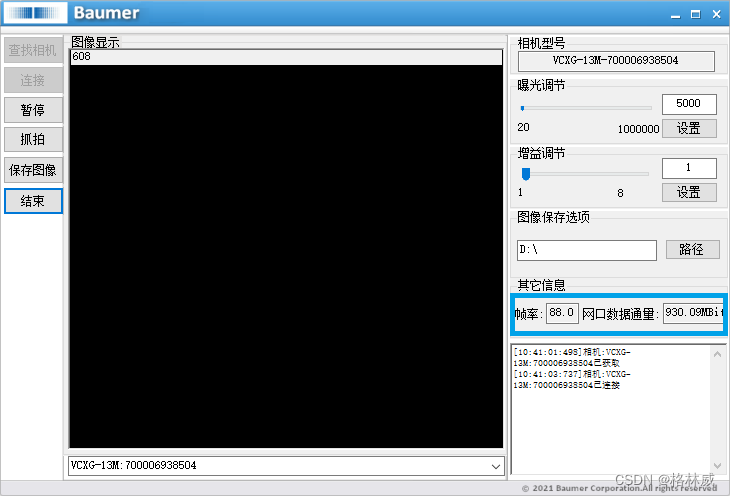
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK获取相机当前数据吞吐量(C++)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK里函数来获取相机当前数据吞吐量(C) Baumer工业相机Baumer工业相机的数据吞吐量的技术背景CameraExplorer如何查看相机吞吐量信息在NEOAPI SDK里通过函数获取相机接口吞吐量 Baumer工业相机通过NEOAPI SDK获…
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK获取相机当前实时帧率(C#)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK获取相机当前实时帧率(C#) Baumer工业相机Baumer工业相机的帧率的技术背景Baumer工业相机的帧率获取方式CameraExplorer如何查看相机帧率信息在NEOAPI SDK里通过函数获取相机帧率 Baumer工业相机通过NEOAPI…
Baumer工业相机堡盟相机如何通过BGAPI SDK联合OpenCVSharp进行图像简单拼接和显示(C#)
Baumer工业相机堡盟相机如何通过BGAPI SDK联合OpenCV进行图像简单拼接和显示(C#) Baumer工业相机Baumer工业相机SDK联合OpenCVSharp的技术背景代码分析第一步:先引用对应的OpenCV的类文件第二步:在回调函数里进行Buffer图像转换并…
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK设置相机的固定帧率(C++)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK设置相机的固定帧率(C) Baumer工业相机Baumer工业相机的固定帧率功能的技术背景CameraExplorer如何查看相机固定帧率功能在NEOAPI SDK里通过函数设置相机固定帧率 Baumer工业相机通过NEOAPI SDK设置相机固定…

提升图像分割精度:学习UNet++算法
文章目录 一、UNet 算法简介1.1 什么是 UNet 算法1.2 UNet 的优缺点1.3 UNet 在图像分割领域的应用 二、准备工作2.1 Python 环境配置2.2 相关库的安装 三、数据处理3.1 数据的获取与预处理3.2 数据的可视化与分析 四、网络结构4.1 UNet 的网络结构4.2 UNet 各层的作用 五、训练…

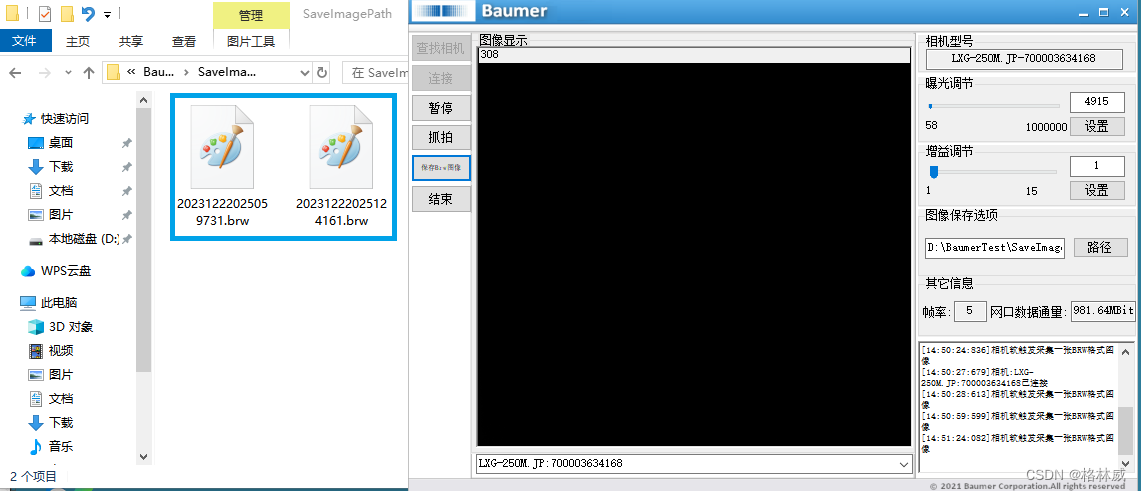
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK实现相机的高速图像保存(C++)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK实现相机的高速图像保存(C)) Baumer工业相机Baumer工业相机的图像高速保存的技术背景Baumer工业相机通过NEOAPI SDK函数图像高速保存在NEOAPI SDK里实现线程高速图像保存:工业相机高…
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK设置相机的固定帧率(C#)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK设置相机的固定帧率(C#) Baumer工业相机Baumer工业相机的固定帧率功能的技术背景CameraExplorer如何查看相机固定帧率功能在NEOAPI SDK里通过函数设置相机固定帧率 Baumer工业相机通过NEOAPI SDK设置相机固…

opencv计算轮廓内面积的两种方法
文章目录一、cv2.contourArea二、按像素个数计算连通域面积一、cv2.contourArea
起初使用该函数的时候看不懂返回的面积,有0有负数的,于是研究了一下。 opencv计算轮廓内面积函数使用的是格林公式计算轮廓内面积的,公式如下: 由…

这就是不创业的最大的原因,机器视觉兄弟们创业要谨慎,为什么99.99%机器视觉公司老板是销售人员?
机器视觉公司,99%公司实行销售优先原则,企业老板99%从销售人员中产生。所以机器视觉兄弟们创业要谨慎。
企业的本质就是通过销售获得利润的组织,销售是立足之本,没有销售,创业就是耍流氓。因此,企业的一切…

机器视觉学习三大忌-贪多,贪杂,贪快
很多年前,我刚做机器视觉工程师的时候,我师傅第一件事和我说,不要学多,不要学那么多,不要以为会了,就怠慢以后的学习,学习是一生的事情,不是一时的事情。我牢牢记住我师傅的话。
…
Baumer工业相机堡盟工业相机如何通过BGAPISDK将相机图像写入相机内存(C++)
Baumer工业相机堡盟工业相机如何通过BGAPISDK将相机图像写入相机内存(C) Baumer工业相机Baumer工业相机BGAPISDK和相机内存的技术背景Baumer工业相机通过BGAPISDK将相机图像写入相机内存功能1.引用合适的类文件2.通过BGAPISDK将相机图像写入相机内存功能…
Ubuntu18.04 下PCL的卸载与安装
目录
一、卸载有问题的PCL1.7
二、编译&&安装PCL1.8.1
2.1、安装PCL依赖
2.2、编译VTK
2.3、编译PCL源码
三、 总结 写这篇博客时,本文方法已经在笔记本Ubuntu和VM虚拟机成功安装PCL1.8.1,并且通过测试。 下文方法同样适用于ubuntu18.04。…
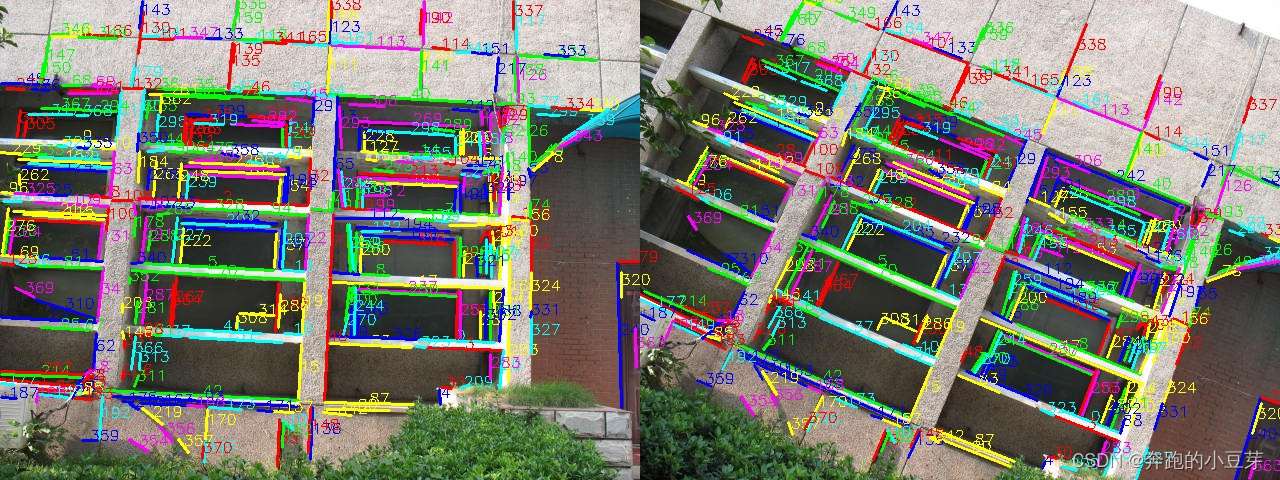
C++ 图像线特征提取及匹配(LineSegmentMatching)
C++ 线特征提取及匹配【LineSegmentMatching】 1 源码下载2 环境配置2.1 添加预定义设置:2.2.配置项目环境2.1 C/C++ --》常规--》附加包含目录:2.2 链接器-》常规--》附加库目录:2.3 链接器-》常规--》输入:3 编译时踩坑记录4.匹配效果输入两幅图像,分别提取两幅图像中的…

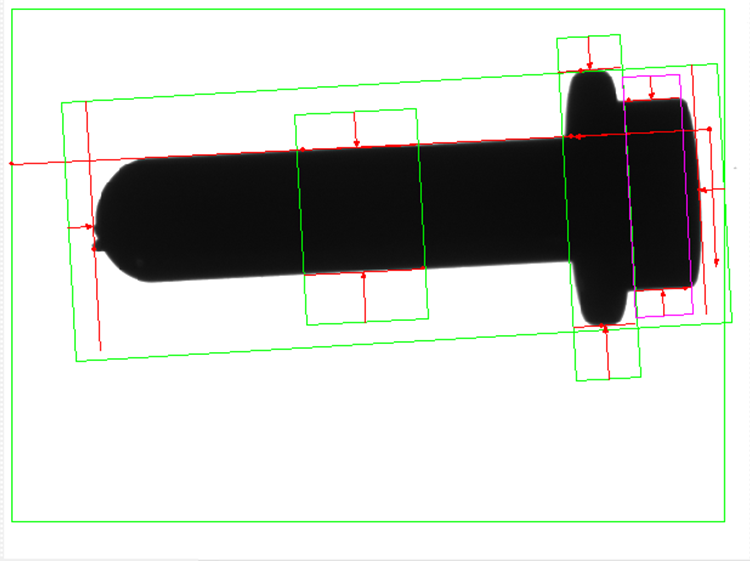
五金件机器视觉定位并获取外观轮廓软硬件视觉方案
【检测目的】
五金件机器视觉定位,视觉检测五金件轮廓并矫正五金件位置进行涂油 【客户要求】
FOV:540*400mm 【拍摄与处理效图一】 【拍摄与处理效图二】 【实验原理及说明】 【方案评估】 根据目前的图像和处理结果来看,可以检测出产品轮廓并进行位置…
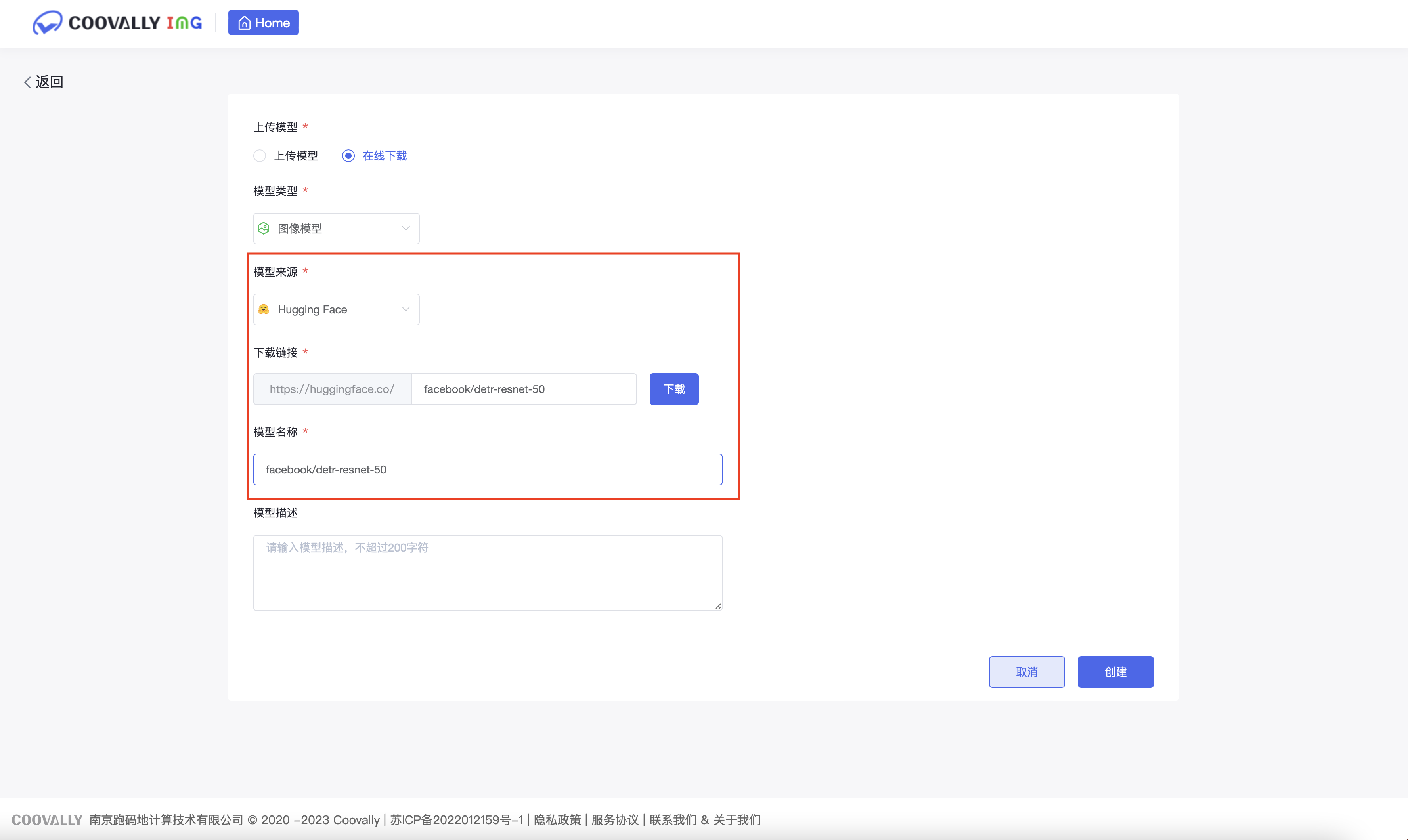
Coovally模型探索:一键下载Hugging Face预训练模型并集成应用
Coovally是一个包含完整AI建模流程、AI项目管理及AI系统部署管理的机器学习平台,可提供数据预处理、智能标注、分布式模型训练、多维度模型评估、一键式模型部署服务。
Coovally支持图像、文本、表格、时间序列等不同类型数据的深度学习和应用,快速实现…
YOLOv8 来了,快速上手实操
目录 YOLOv8的优点安装ultralytics使用YOLOv8n在图像上进行PredictTasks与 ModesModes - 模式分类Tasks - 任务分类 👨💻 作者简介:程序员半夏 , 一名全栈程序员,擅长使用各种编程语言和框架,如JavaScript、React、N…
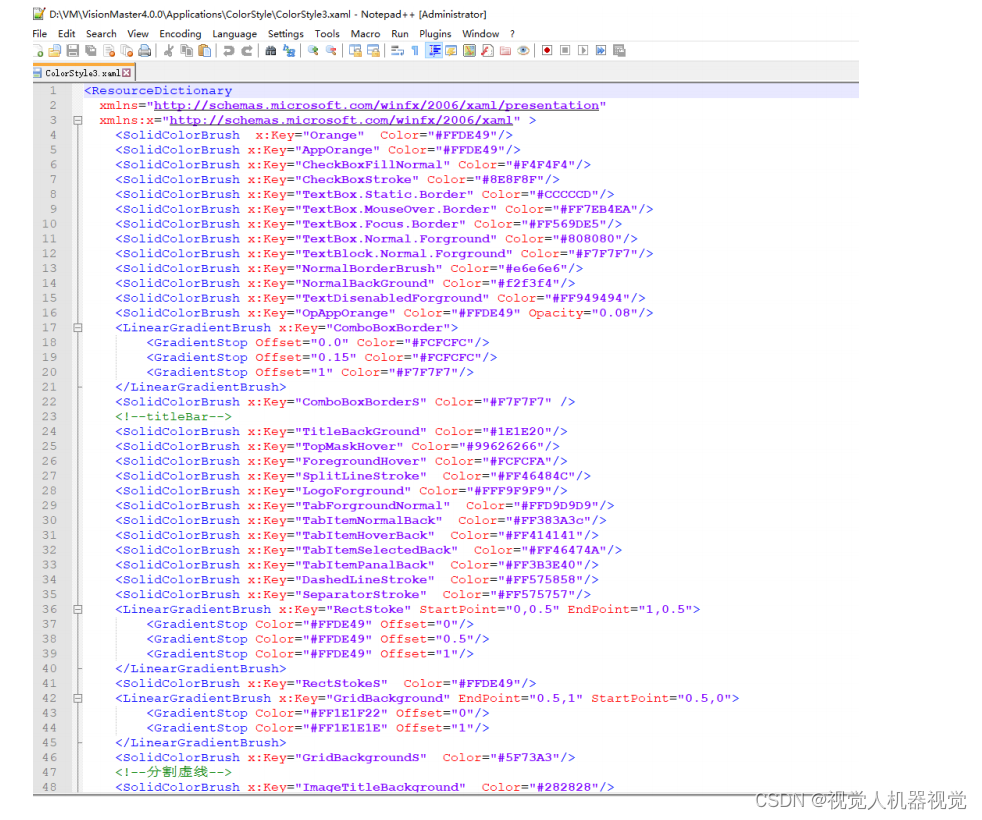
海康visionmaster-渲染结果:控件颜色:控件颜色修改的方法
描述 环境:VM4.0.0 VS2015 及以上 现象:简易修改 VM 控件的颜色? 解答 对二次开发中嵌入控件的颜色进行修改,具体代码如下: C# string colorinfo “ColorStyle3”; AppColorService.CurColorDefine colorinfo; “Co…

OPT (奥普特)锂电池视觉检测技术精彩亮相CIBF
5月16~18日,第十五届中国国际电池技术展览会在深圳举办,全球2500多家优秀电池企业参展。
OPT(奥普特)作为锂电行业机器视觉核心供应商,携3D、深度学习、分频技术等视觉检测技术亮相,并展示了上…

深眸科技聚焦AI机器视觉检测,驱动3C电子行业集成创新实现新需求
随着消费的升级及国家政策的助推,国内3C电子市场不断扩大,行业实现高速发展。近年来,3C电子产品持续迭代,生产工艺也逐渐复杂化,相关生产线定位组装、零部件检测、整机产品检测等环节,亟需使用具备较强适应…
海康Visionmaster-全局脚本:通过通讯触发快速匹配 模块换型的方法
如何实现根据通讯信号切换快速匹配的模型文件并触发流程执行? 1.动态切换模板需在全局脚本中调用相关接口实现,可以在全局脚本的通讯数据接收回调中实现代码逻辑,代码如下。
C#
using System;
using VM.GlobalScript.Methods;
using System.…
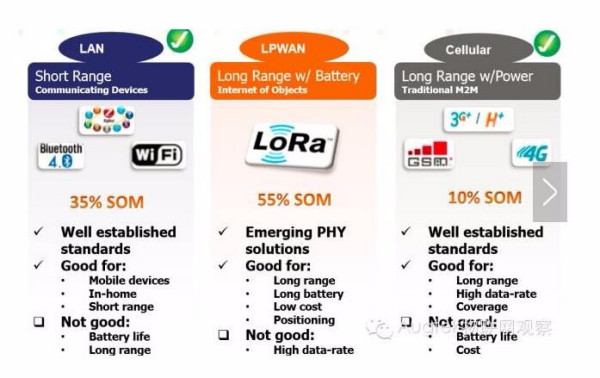
LoRa与ZigBee有什么区别?
1、LoRa技术简介:
物联网应用中的无线技术有多种,可组成局域网或广域网。组成局域网的无线技术主要有2.4GHz的WiFi,蓝牙、Zigbee等,组成广域网的无线技术主要有2G/3G/4G等。这些无线技术,优缺点非常明显,可…
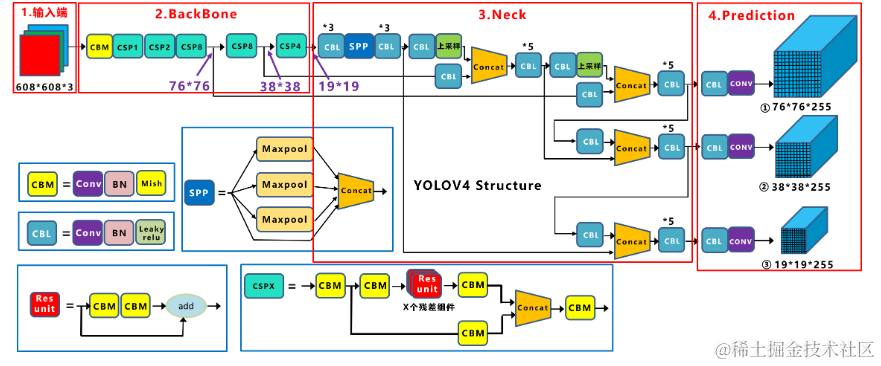
YOLOv3模型原理深度解析
概况
(1)YOLOv3是YOLO系列第一次引入残差连接来解决深度网络中的梯度消失问题(是不是第一次,有待你后面考证),实际用的backbone是DarkNet53
(2)最显著的改进,也是对你涨…
线扫相机DALSA--常见问题四:修改相机参数,参数保存无效情况
该问题是操作不当,未按照正常步骤保存参数所致,相机为RAM机制,参数需保存在采集卡的ROM内。 保存参数步骤: ①首先将相机参数保存至User Set1; ②然后回到Board(采集卡)参数设置区,鼠标选中Basic Timing&a…
Baumer工业相机堡盟工业相机如何通过BGAPISDK设置相机的Bufferlist序列(C++)
Baumer工业相机堡盟工业相机如何通过BGAPISDK设置相机的Bufferlist序列(C) Baumer工业相机Baumer工业相机的Bufferlist序列功能的技术背景CameraExplorer如何查看相机Bufferlist功能在BGAPI SDK里通过函数设置相机Bufferlist参数 Baumer工业相机通过BGAP…

海康Visionmaster-全局脚本:通信设备 ID 获取方法
全局脚本中通信数据接收函数中的 DeviceID 是按照设备管理列表中至上而下、从 0 开始依此增 1,现在这种方法行不通. 每次增加设备列表都会分配唯一的 ID 号,后续全局脚本中判断设备 ID 通过这个唯一 ID 识别,不再从上到下默认排序。
ZED2双目相机kalibr标定终于得到了个相对满意的结果
之前的实验数据效果不佳,回溯查找问题,发现VINS跑纯双目的结果很差,经常性的跑飞,结果很离谱。之前VGA模式下,最好的标定结果如下:
调整了图片分辨率为720P,这样图片清晰很多,会提高特征点提取…
采用camera_calibration进行双目相机标定
之前使用kalibr工具标定双目相机获得相机相关参数,但实验看来效果不太好,故尝试采用camera_calibration进行双目相机标定,ROS 官方提供了camera_calibration 包,通过这个包可以使用棋盘标定板对单目和双目相机进行标定。
准备工作
1.系统环境:ubuntu20.04
2.安装 camer…
机器视觉初步2:机器视觉基础知识
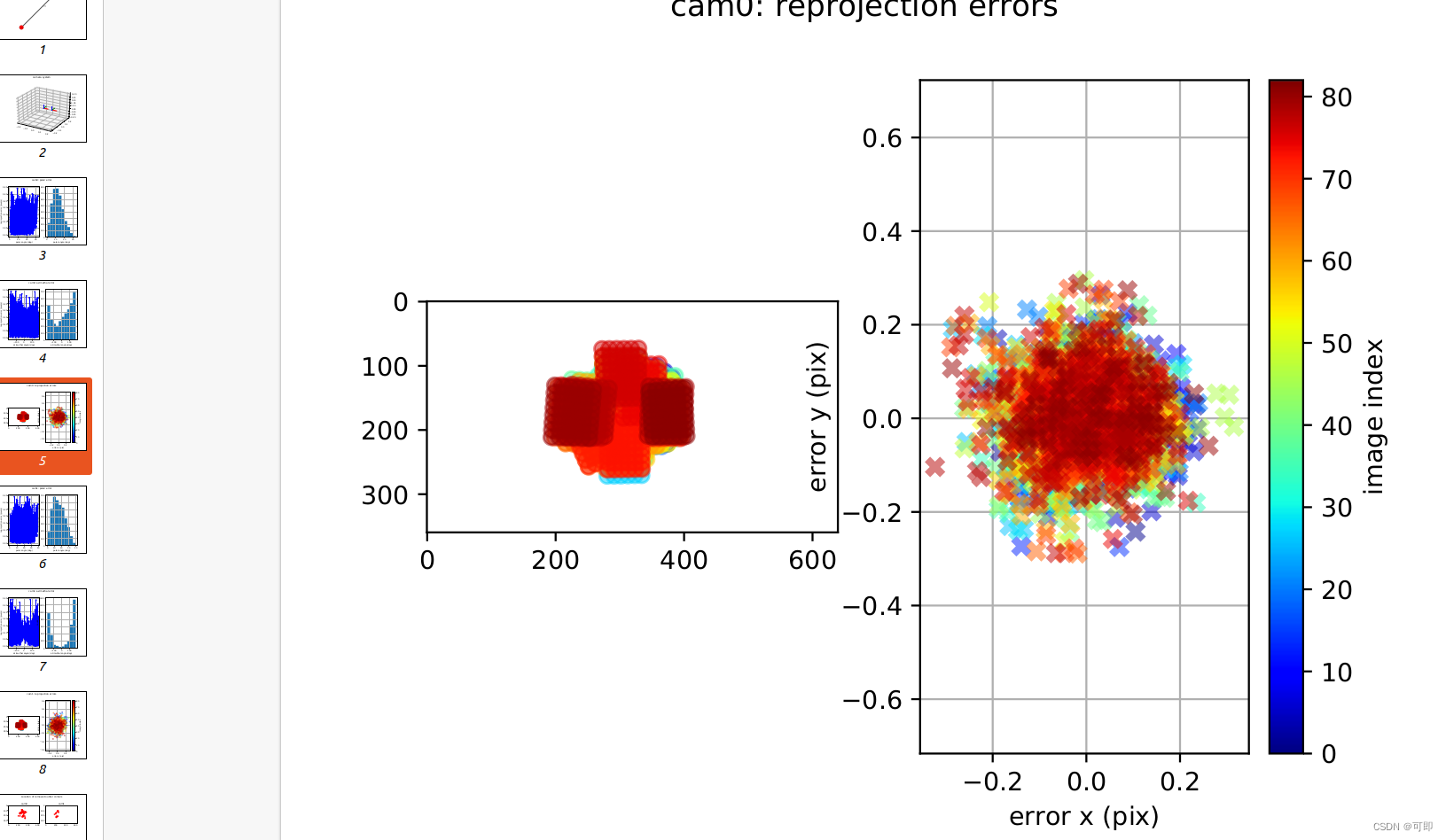
本节概况 1.机器视觉的定义2.机器视觉系统的工作流程3.机器视觉的组成视场和最大像面 1.机器视觉的定义
什么是机器视觉,其中美国的一种定义为: “机器视觉是研究如何通过光学装置和非接触式传感器自动地接收、处理真实场景的图像,以获得所需…

机器视觉公司为什么宁愿高薪招新人,也不愿加薪留老员工?老员工特殊时间特殊照顾,新人必须常照顾
职场常出现的“薪酬倒挂”现象。其实这是正常的职场规律,实际上是企业管理不得不面对的一种选择。 很多企业宁愿老员工离职也不加薪,却高薪请新员工?这就是职场上的鲶鱼效应,一些高层领导认为一个企业,老员工好比沙…
【YOLOv5代码整理】
YOLO v5代码整理1 yolo前期准备-安装pytorch注意,需要安装pytorch 1.6版本以上创建虚拟环境命令行conda create -n my_pt38 python3.8激活my_pt38环境:
conda activate my_pt38在所创建的环境下安装pytorch的1.6版本以上(官网https://pytorc…

LPWAN产业何时才能真正爆发?
导读: 虽然LPWAN目前还有重重困难,但是我们有充分的理由相信LPWAN即将爆发的趋势不变,当然,因为LPWAN是一个技术流派繁多的市场,除了LoRa、NB-IOT、eMTC还有RPMA、ZETA等等众多的技术流派,对于应用企业而言…

第二十二章 LaneAF框架结构以及接入MMDetection3D模型(车道线感知)
一 前言 近期参与到了手写AI的车道线检测的学习中去,以此系列笔记记录学习与思考的全过程。车道线检测系列会持续更新,力求完整精炼,引人启示。所需前期知识,可以结合手写AI进行系统的学习。 二 LaneAF接入openlane数据集 2.1 Lan…

【机器视觉系统】NoobVision
NoobVision
基于Qt/C实现的视觉框架平台,已有多款项目成功实施 功能不算非常完善,但架构设计成熟 Q 2903612753

WIFI温湿度监测解决方案
一、方案背景
这样的大环境下,如何有效地管理传感器设备,降低基础设施投资成本,成为企业关注的问题。
WiFi温湿度监测解决方案是以温湿度传感器为监测终端,以WiFi作为信号的传输媒介,将采集到的温度和湿度数据上传到…
Baumer工业相机堡盟工业相机如何通过BGAPI SDK使用UserSet功能保存和载入相机的各类参数(C++)
Baumer工业相机堡盟工业相机如何通过BGAPI SDK使用UserSet功能保存和载入相机的各类参数(C)Baumer工业相机Baumer工业相机BGAPISDK中UserSet的技术背景代码案例分享第一步:保存相机当前参数设置UserSet_Save第二步:载入已经保存的…
Baumer工业相机堡盟工业相机如何使用BGAPI SDK控制相机数据流的开启和关闭(C#)
Baumer工业相机堡盟工业相机如何使用BGAPI SDK控制相机数据流的开启和关闭(C#) Baumer工业相机Baumer工业相机BGAPI SDK的技术背景Baumer工业相机使用BGAPISDK控制相机数据流的方式1.引用合适的类文件2.使用BGAPISDK控制相机数据流的方式2.使用BGAPISDK控…
Dockfile 安装tensorflow gdal遥感领域
# 基础镜像, cuda为10.2.0/10.1.0,ubuntu18.04
FROM nvidia/cuda:10.0-cudnn7-devel-ubuntu18.04# 配置程序依赖环境
RUN apt-get update && apt-get install -y --no-install-recommends \build-essential \cmake \curl \ wget \ca-certificate…

求臻医学满分通过EMQN室间质评,检测实力再获国际权威机构认可
近日,欧洲分子基因诊断质量联盟(European Molecular Genetics Quality Network,EMQN)公布了2023年Oncogene panel 项目能力验证考核结果,求臻医学旗下北京和杭州检验实验室,使用自主研发的ChosenOne大Panel…

微软自动调参工具 NNI 使用事例教程
第一步:安装
nni的安装通过pip命令就可以安装了。并且提供了example供参考学习。
系统配置要求:tensorflow,python > 3.5 # 安装nnipython3 -m pip install --upgrade nni# 示例程序,用于学习git clone https://github.com/M…

这些机器视觉工程师犯法了,竟然在闲鱼或淘宝上卖公司的机器视觉程序架构源码
目录 从个人层面来讲:从公司层面来讲: 从个人层面来讲:
个人是法盲,法律意识淡薄只是一方面,另外一个方面就是对于代码的所有权,以及代码的安全性重视不够。把机器视觉程序架构源码打包在闲鱼或淘宝上…

OPT(奥普特)精彩亮相VisionChina 2022
11月17日,为期三天的VisionChina 2022中国(深圳)机器视觉展圆满结束。作为中国屈指可数的专业机器视觉展览会,吸引来自各地的机器人、运动控制等领域的品牌齐聚。
OPT(奥普特)作为自动化核心零部件核心供应…
机器视觉系统选型-线阵工业相机选型
线阵相机特点:
1.线阵相机使用的线扫描传感器通常只有一行感光单元(少数彩色线阵使用三行感光单元的传感器) 2.线阵相机每次只采集一行图像; 3.线阵相机每次只输出一行图像; 4.与传统的面阵相机相比,面阵扫…
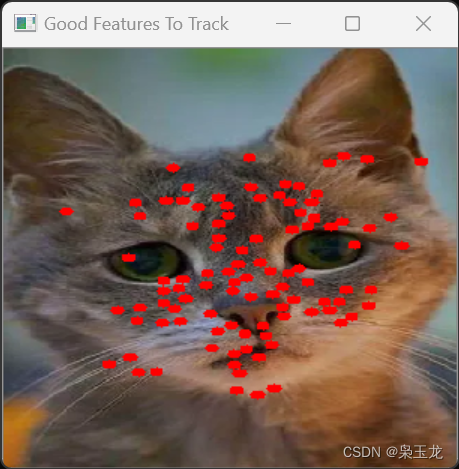
c++视觉检测------Shi-Tomasi 角点检测
Shi-Tomasi 角点检测 :goodFeaturesToTrack()
goodFeaturesToTrack() 函数是 OpenCV 中用于角点检测的功能函数。它的主要作用是检测图像中的良好特征点,通常用于计算机视觉任务中的光流估算、目标跟踪等。
函数签名:
void goodFeaturesTo…
Baumer工业相机堡盟工业相机如何使用BGAPISDK的相机图像时间戳计算运行时间以及时间差(C++)
Baumer工业相机堡盟工业相机如何使用BGAPISDK的相机图像时间戳计算运行时间以及时间差(C) Baumer工业相机Baumer工业相机BGAPI SDK和图像时间戳的技术背景Baumer工业相机使用BGAPISDK控制相机数据流的方式1.引用合适的类文件2.使用BGAPISDK获取时间戳的方…

YOLOX训练自己的数据集(包含自己数据集,预训练模型,代码公开),踩扁很多细节坑全部补充
首先 看下作者给的性能对比图
YOLOX 是旷视开源的高性能检测器。旷视的研究者将解耦头、数据增强、无锚点以及标签分类等目 标检测领域的优秀进展与 YOLO 进行了巧妙的集成组合,提出了 YOLOX,不仅实现了超越 YOLOv3、 YOLOv4 和 YOLOv5 的 AP࿰…

机器视觉工程们,我们值多少钱
(QQ群有答疑)零基础小白快速上手海康VisionMaster开发系列课程 UP主你的主题太吸引人,也太不近人情世故了,实施上,别人总是这样子去想。 人们会根据自己的观点去评价别人,去评估别人的价值,其实…
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK使用UserSet功能保存和载入相机的各类参数(C++)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK使用UserSet功能保存和载入相机的各类参数(C) Baumer工业相机Baumer工业相机NEOAPISDK中UserSet的技术背景代码案例分享第一步:保存相机当前参数设置UserSet_Save第二步:载入已经保存…

你被骗了吗?别拿低价诱骗机器视觉小白,4000元机器视觉系统怎么来的?机器视觉工程师自己组装一个2000元不到,还带深度学习
淘宝闲鱼,大家搜搜铺价格,特别是机器视觉小白。
机架:(新的)200元以下。(看需求,自己简单打光,买个50元的。如果复杂,就拿给供应商免费打光)
相机,镜头:&am…

第二十七章 解读Transformer_车道线检测中的Transformer(车道线感知)
前言 近期参与到了手写AI的车道线检测的学习中去,以此系列笔记记录学习与思考的全过程。车道线检测系列会持续更新,力求完整精炼,引人启示。所需前期知识,可以结合手写AI进行系统的学习。 SE简单实现
class SELayer(nn.Module):d…
深眸科技以机器视觉高性能优势,为消费电子行业提供优质解决方案
机器视觉技术近年来发展迅速,基于计算机对图像的处理与分析,能够识别和辨别目标物体,被广泛应用于人工智能、智能制造等领域。
机器视觉凭借着高精度、高效率、灵活性和可靠性等优势,不断推进工业企业生产自动化和智能化进程&…
YOLOv5算法改进(12)— 替换主干网络之Swin Transformer
前言:Hello大家好,我是小哥谈。Swin Transformer是一种基于Transformer的深度学习模型,它在视觉任务中表现出色。与之前的Vision Transformer(ViT)不同,Swin Transformer具有高效和精确的特性,并…

机器视觉行业,日子不过了吗?都进入打折潮,双11只是一个借口,打广告出新招,日子不好过是真的
我就不上图了,大家注意各个机器视觉公司公众号,为什么打折?打广告也只是宣传手段,进入打折潮,内卷严重,价格战变成白刃战,肯定日子不好过了。

机器视觉工程师吐槽的常见100个名场面
学了后发现真没用,只能越干越多 德创跑的快,苏映视裁的快,上帝说,要有光,我是凌云光。 这群里面有多少从德创跑路的 去年我辛辛苦苦干一年顶两年了,单双休变单休或者无休,节假日全部对半砍。加班…

机器视觉系统选型-定光照强度
同一个外形结构的光源,光照强度受如下影响:
单颗灯珠的亮度灯珠排列的数量和密度漫射板/防护板的材质(透明、半透明、全漫射) 在合理范围内提升光照强度,可降低对相机曝光时长的要求
外形结构尺寸相同的两款光源&am…
Baumer工业相机堡盟工业相机如何通过BGAPISDK显示Bayer彩色格式的图像(C#)
Baumer工业相机堡盟工业相机如何通过BGAPISDK显示Bayer彩色格式的图像(C#)Baumer工业相机Baumer工业相机的Bayer彩色图像的技术背景Baumer工业相机通过BGAPI SDK在回调函数里显示Bayer彩色图像Baumer工业相机在BufferEvent显示Bayer彩色图像Baumer工业相…

OPT液态镜头上市,视觉检测实现瞬时对焦
为满足客户提质增效需求,OPT自研的液态镜头全新上市,与智能读码器、工业相机搭配应用,性能优势突出,实现瞬时对焦,工作距离更加灵活,可以更好地适用于3C、物流等行业
液态镜头技术,基于仿生科学…
海康visionmaster-渲染控件:渲染控件加载本地图像的方法
描述 环境:VM4.0.0 VS2015 及以上 现象:渲染控件如何显示本地图像? 解答 思路:在 2.3.1 中,可以通过绑定流程或者模块来显示图像和渲染效果。因此,第一步, 可以使用在 VM 软件平台中给图像源模…
DCAMnet网络复现与讲解
距论文阅读完毕已经过了整整一周多。。。终于抽出时间来写这篇辣!~ 论文阅读笔记放这里: 基于可变形卷积和注意力机制的带钢表面缺陷快速检测网络DCAM-Net(论文阅读笔记)-CSDN博客 为了方便观看,我把结构图也拿过来了。…
机器视觉系统选型-选型示例分享
选型示例 该相机像元大小:3.45 3.45um,分辨率4096 3000pixel 所以传感器长宽为:14.1312 10.35mm 靶面尺寸为:17.5161mm 1.1” 所以镜头靶面要求:≥1.1”,可选择KF系列或者SA系列 放大倍率:se…
Baumer工业相机堡盟工业相机如何通过BGAPISDK设置相机的Bufferlist序列(C#)
Baumer工业相机堡盟工业相机如何通过BGAPISDK设置相机的Bufferlist序列(C#) Baumer工业相机Baumer工业相机的Bufferlist序列功能的技术背景CameraExplorer如何查看相机Bufferlist功能在BGAPI SDK里通过函数设置相机固定帧率 Baumer工业相机通过BGAPI SDK…
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK设置相机的图像剪切(ROI)功能(C#)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK设置相机的图像剪切(ROI)功能(C#) Baumer工业相机Baumer工业相机的图像剪切(ROI)功能的技术背景CameraExplorer如何使用图像剪切(ROI)…
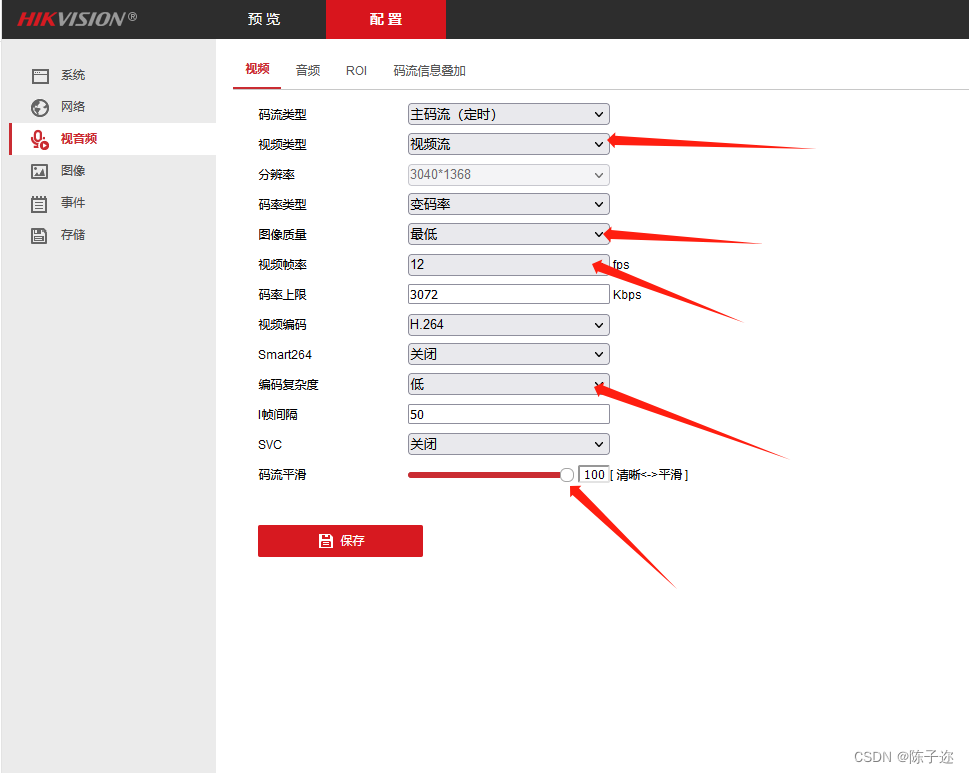
如何降低海康、大华等网络摄像头调用的高延迟问题(二)
目录
1.RTSP介绍
2.解决办法1
3.解决办法2 1.RTSP介绍
RTSP(Real-time Streaming Protocol)是一种用于实时流媒体传输的网络协议。它被设计用于在服务器和客户端之间传输音频、视频以及其他流媒体数据。
RTSP协议允许客户端通过与服务器建立RTSP会话…
探索人工智能中的语言模型:原理、应用与未来发展
导言 语言模型在人工智能领域中扮演着重要的角色,它不仅是自然语言处理的基础,也是许多智能系统的核心。本文将深入研究语言模型的原理、广泛应用以及未来发展趋势。
1. 语言模型的原理
统计语言模型: 基于概率统计的传统语言模型&…
【Aileen送书福利第一期】—— OpenCV4工业缺陷检测的六种方法
机器视觉
机器视觉是使用各种工业相机,结合传感器跟电气信号实现替代传统人工,完成对象识别、计数、测量、缺陷检测、引导定位与抓取等任务。其中工业品的缺陷检测极大的依赖人工完成,特别是传统的3C制造环节,产品缺陷检测依赖于…

海康Visionmaster-通讯管理:使用 Modbus TCP 通讯 协议与流程交互
使用 Modbus TCP 通讯协议与视觉通讯,当地址为 0000 的保持型寄存器(4x 寄存器)变为 1 时,触发视觉流程执行一次,同时视觉将地址为 0000 的寄存器复位(也即写为 0),视觉流程执行完成后,将结果数…
新方案登场!“软硬兼施”让光伏组件焊接检测更高效
焊接是光伏组件生产中重要的工艺流程,就拿光伏组件中常见的组成部分——接线盒来举例,作为完成组件电力传输的关键器件,在组件的自动化生产过程中,接线盒的电极焊接质量直接关乎组件的性能,焊接质量检测的重要性不言而…
Baumer工业相机堡盟相机使用BGAPISDK联合Halcon直接进行彩色图像显示(Color)(C#)(将图像数据Buffer转为HObject)
Baumer工业相机堡盟相机使用BGAPISDK联合Halcon直接进行彩色图像显示(Color)(C#)(将图像数据Buffer转为HObject) Baumer工业相机Baumer工业相机SDK联合Halcon的技术背景代码分析1.引用合适的类文件2.在相机…
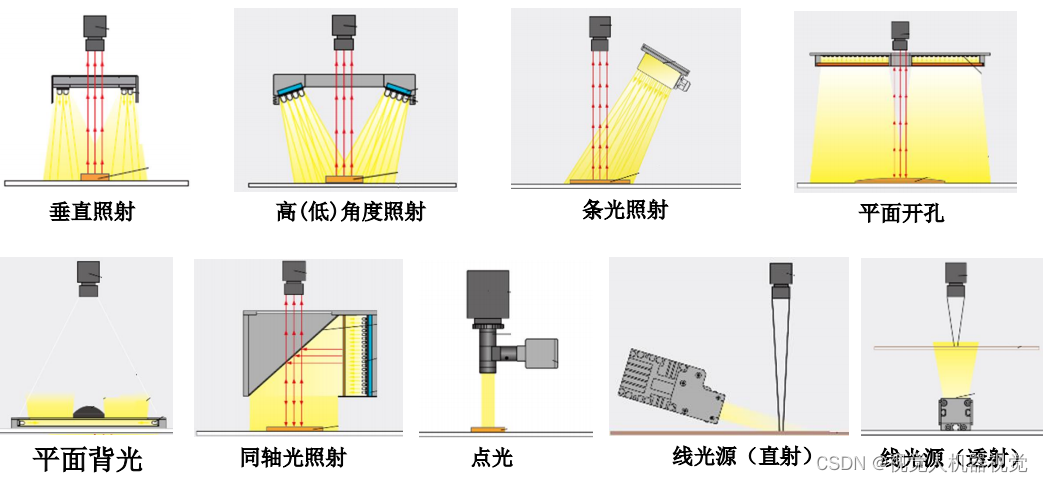
机器视觉系统中工业光源选型避坑指南
光源的作用: 照亮目标,提高目标亮度 形成有利于图像处理的效果,提升对比度 克服环境光干扰,保证图像的稳定性
光源的选型思路: ①颜色 ②外形 ③打光方式 ④亮度
选颜色 通过选择合适颜色的光源,…

海康视觉——当不更新拍照时,使用上一张的图像进行运算
一、需求:
机器需要一个功能,将标签贴在标签位置上
一个载具上有五个标签位,每个标签位只在Y轴间隔相同距离
相机只在第一个标签位才拍照,之后四个标签位根据第一个标签位的图像进行修正XYR后
直接移动Y轴距离就可以进行后四个…
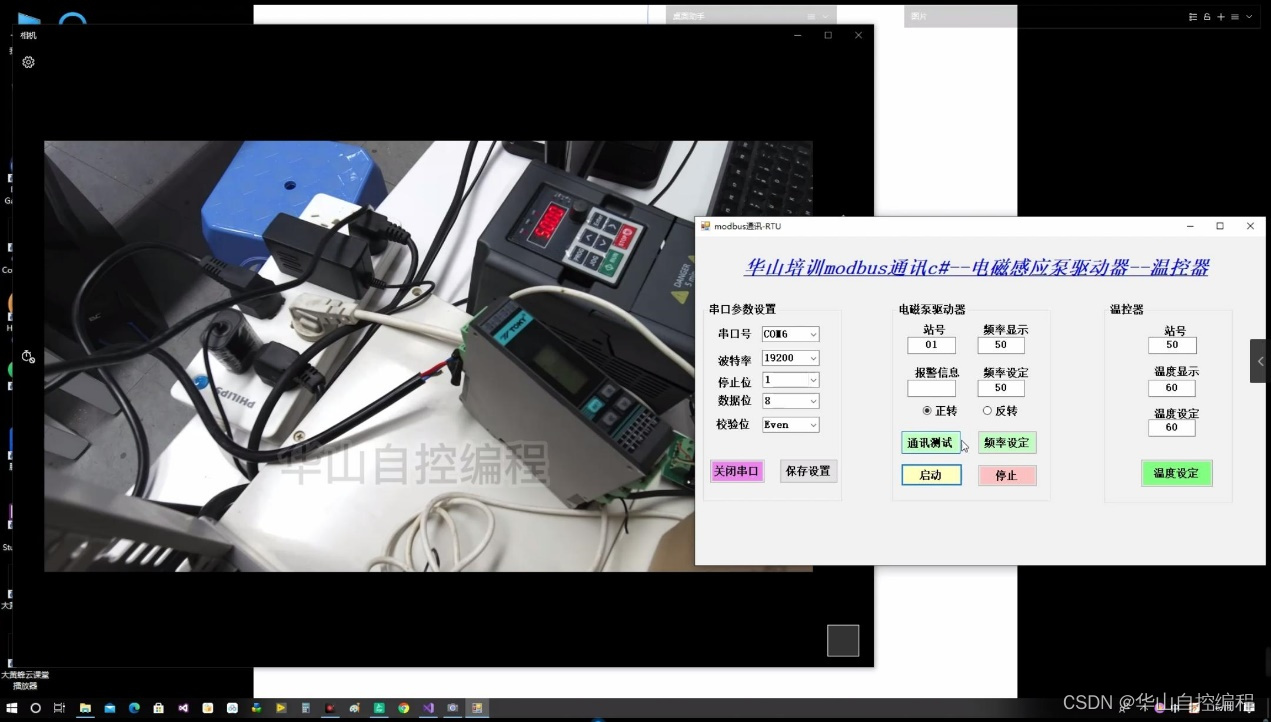
实战项目!ModbusRTU协议电磁泵驱动器温控器通讯讲解
大家好,我是华山自控编程的朱老师。
在之前的网课中,我们已经讲解了以下内容
1.C#与PLC的串口通讯
2.C#与变频器的通讯
3.C#的服务器和客户端的网络通讯
今天,我要视频和大家分享的是关于C#与我们的电磁泵驱动器以及C#与温控器的Modbus通…

Baumer工业相机堡盟工业相机如何通过BGAPI SDK实现Raw格式的图像保存(C++)
Baumer工业相机堡盟工业相机如何通过BGAPI SDK实现Raw格式的图像保存(C) Baumer工业相机Baumer工业相机通过SDK实现Raw格式的图像保存的技术背景通过SDK获取相机信息的代码分析Baumer工业相机回调函数里保存原始图像数据Baumer保存Raw图像格式重要核心代…

视觉检测相比于人工目视检测有哪些优势
技术的发展可以给我们带来好的结果。 是其中之一。 这在现代工业生产中非常常见。 视觉检测设备可以更好地检测生产中的错误和产品质量问题,提高工业生产的效率和自动化水平,提高工业生产的准确性,加快工作进度,节约时间ÿ…
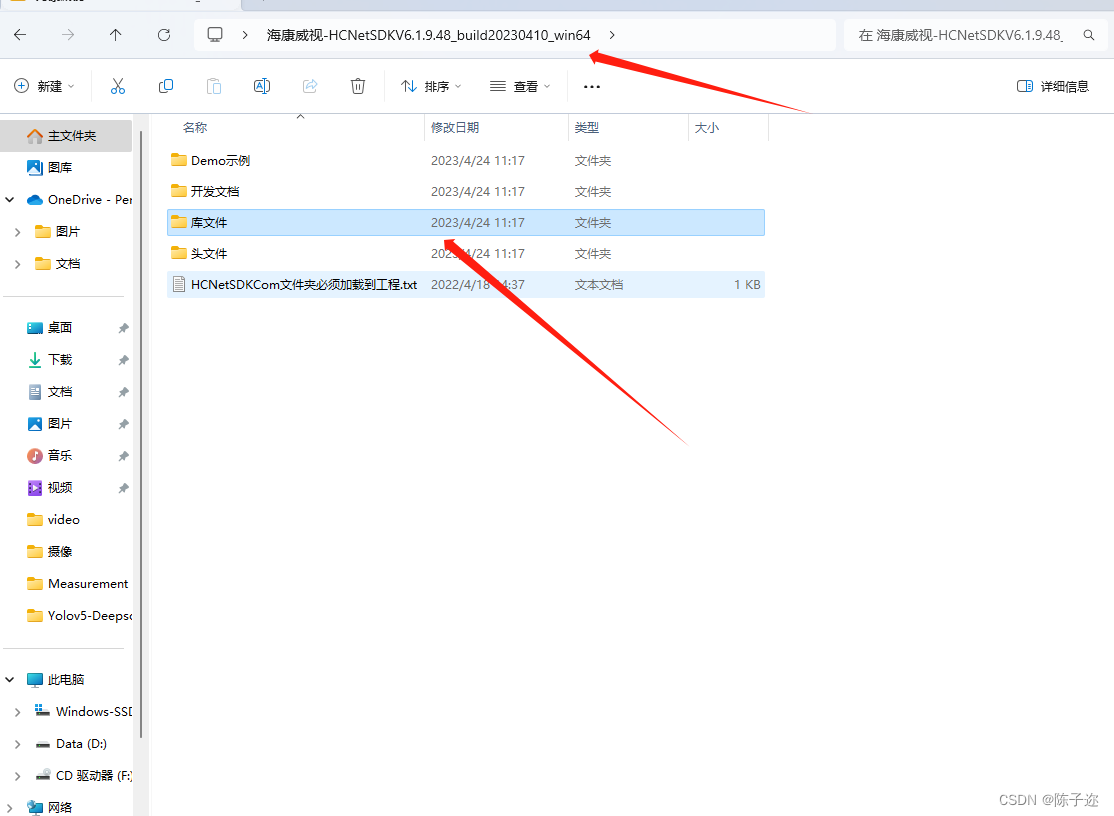
如何降低海康、大华等网络摄像头调用的高延迟问题(一):海康威视网络摄像头的python sdk使用(opencv读取sdk流)
目录
1.python sdk使用
1.海康SDK下载 2.opencv读取sdk流 先说效果,我是用的AI推理的实时流,延迟从高达7秒降到小于1秒
如果觉得这个延迟还不能接受,下一章,给大家介绍点上不得台面的小方法 SDK(Software Developme…
Baumer工业相机堡盟工业相机如何通过BGAPISDK使用AutoFocusHelper自动对焦补充功能(C++)
Baumer工业相机堡盟工业相机如何通过BGAPISDK使用AutoFocusHelper自动对焦补充功能(C) Baumer工业相机Baumer工业相机BGAPISDK和AutoFocus功能的技术背景Baumer工业相机通过BGAPISDK使用AutoFocus功能1.引用合适的类文件2.通过BGAPISDK声明AutoFocusHelp…
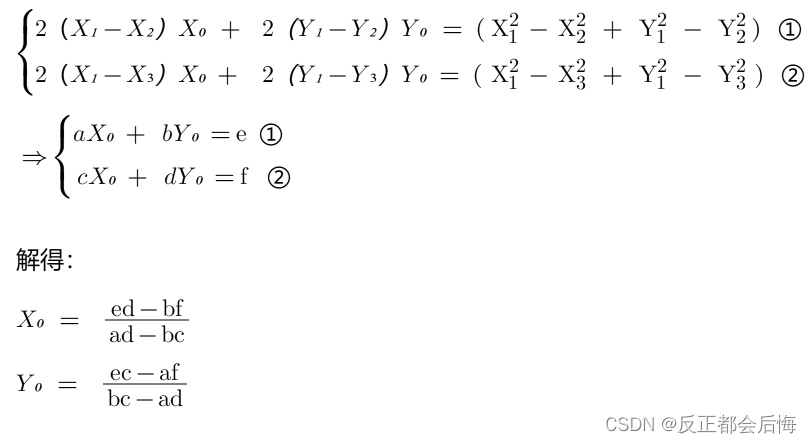
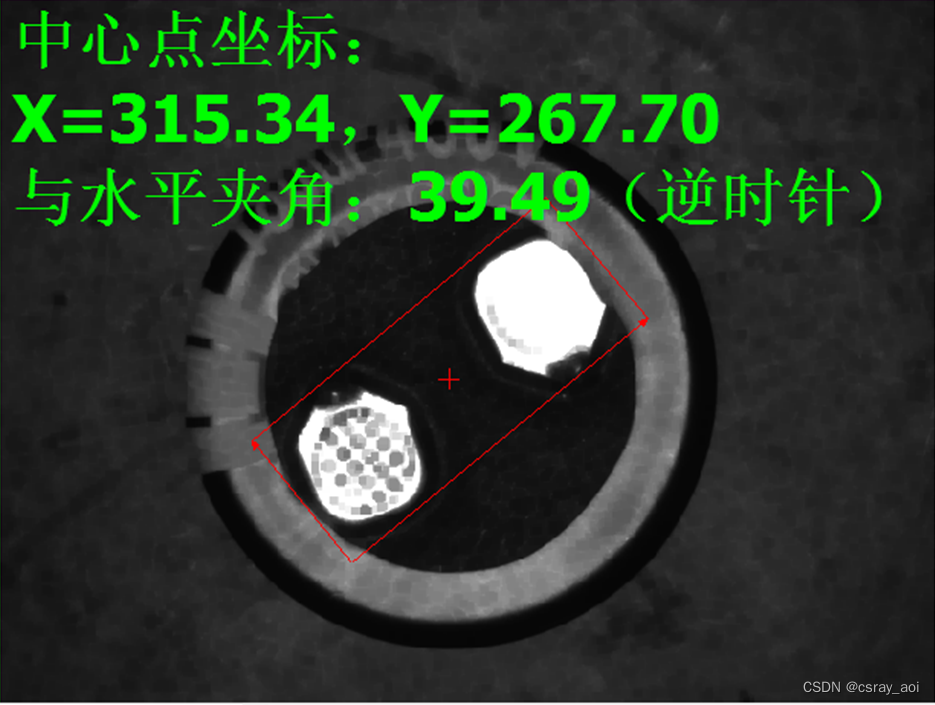
【机器视觉------标定篇(二)】三点成圆算法(求相机旋转中心)
应用场景
机器视觉项目应用中,相机安装在机器人上,并且需要定位产品返回坐标偏差以及角度偏差。 与九点标定配合使用,实现精准角度补偿。
算法输入
不共线的三点坐标 A(X₁,Y₁) ,B(X₂,Y₂&…
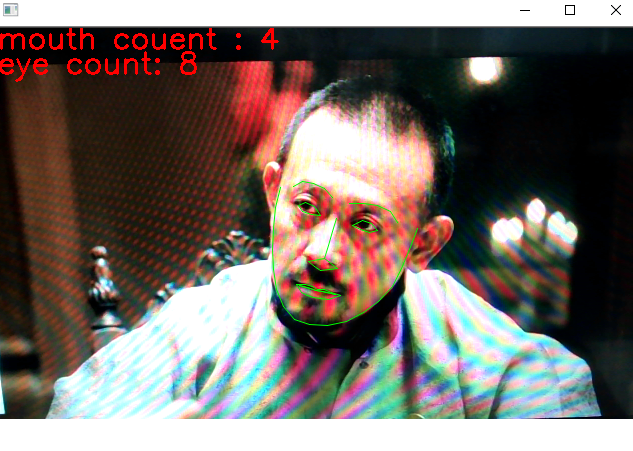
使用opencv和dlib库(C++代码)实现人脸活体检测(眨眼、张嘴、摇头检测)
前言 本文章使用opencv和dlib库,使用C++代码实现了人脸活体检测,包括眨眼检测、张嘴检测以及摇头检测,可以对静态图片和活体进行有效区分。效果展示 Dlib库介绍 dlib是一个开源的C++机器学习库,它提供了一系列用于图像处理、人脸检测、人脸识别、物体检测、图像标注等功能的…

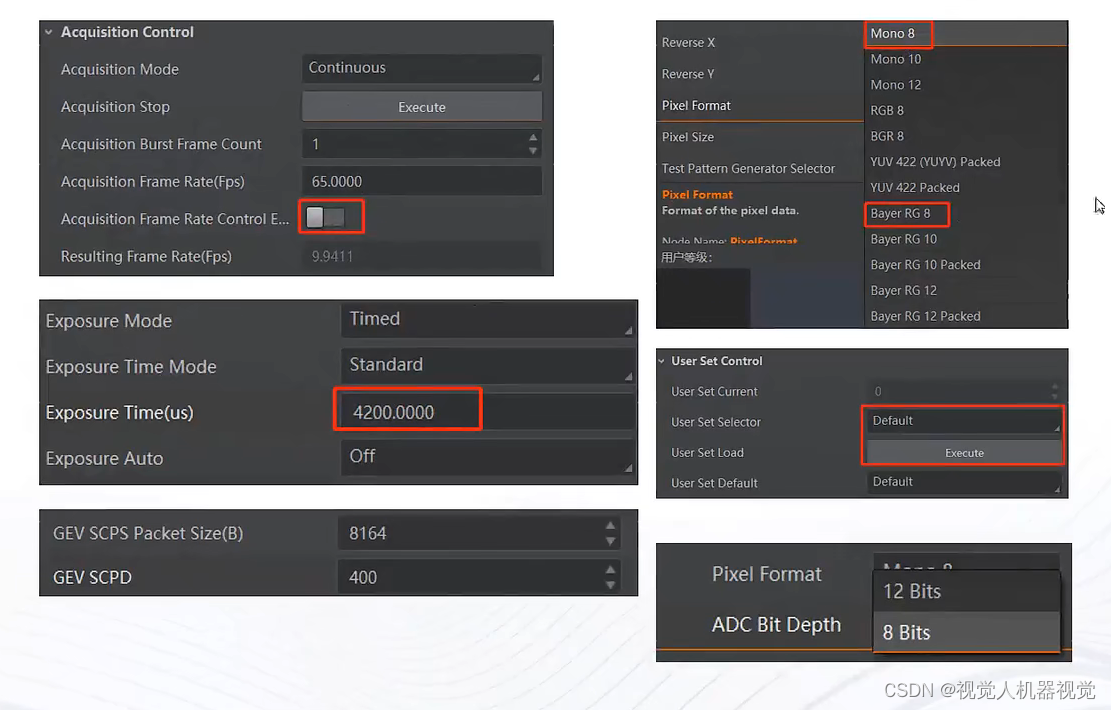
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK修改图像像素格式Mono8或者Mono10(C#)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK修改图像像素格式Mono8或者Mono10(C#) Baumer工业相机Baumer工业相机的图像像素格式的技术背景CameraExplorer如何查看修改相机图像像素格式信息在NEOAPI SDK里通过函数修改图像像素格式修改像素格式测试演…
Baumer工业相机堡盟工业相机如何通过BGAPI SDK获取偏振相机4个角度的图像转换和显示(C#)
Baumer工业相机堡盟工业相机如何通过BGAPI SDK获取偏振相机4个角度的图像转换和显示(C#) Baumer工业相机Baumer工业相机偏振相机的技术背景代码案例分享1:引用合适的类文件2:回调函数里通过BGAPI SDK获取偏振相机四个偏振角度的图…

音视频/流媒体协议和编码汇总
一、流媒体协议
1. RTMP/RTMPT/RTMPS/RTMPE 等多变种
是应用层协议,使用TCP作为底层传输协议,并提供了低延迟、高带宽利用率和实时性的特点。 (1)RTMP协议是Adobe的私有协议,未完全公开 (2)一般传输的是 flv,f4v 格式流
2. RTP/RTCP/SRTP …
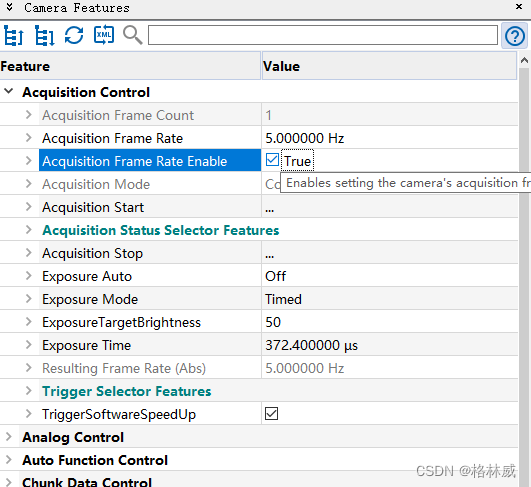
Baumer工业相机堡盟工业相机软件CameraExplorer常见功能使用说明
Baumer工业相机堡盟工业相机软件CameraExplorer常见功能使用说明 Baumer工业相机Baumer工业相机图像采集功能Baumer工业相机图像基本参数设置 Baumer工业相机
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计…

CCD视觉检测设备如何选择光源
CCD视觉检测设备的机器视觉系统对光源的要求很高,光源是决定图像质量的一个重要因素。那么,我们就来看看CCD图像加网设备和机器视觉系统光源的选择点——CCD图像加网设备。 CCD视觉检测设备机器视觉系统光源选择要点:
1. 对比度:…
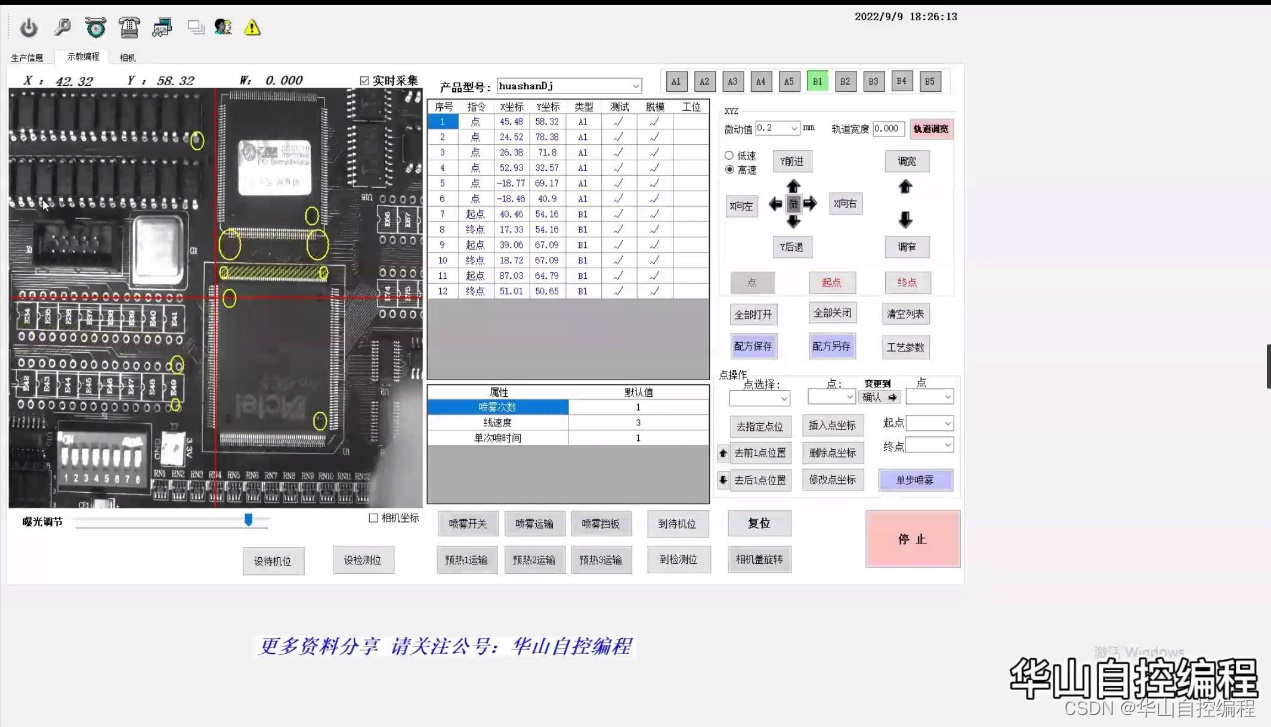
实战必看!工程项目中简单高效的示教编程
大家好,我是华山自控编程朱老师
示教编程是一种简单高效的方法,通过可视化界面和图像采集,可以指导编程操作,提高生产效率。
在本视频中,我们将分享一个项目,重点介绍如何进行简单高效的示教编程。 实战必…
SLAM中的三角化方案
Linear triangulation methods 又称为线性三角形法,其作用是通过同一个三维空间点在两个视图中的平面坐标(也可以认为是像素坐标),求解这个三维空间点的世界坐标。通常的求解方式有两种,一种是数值求解;一种…
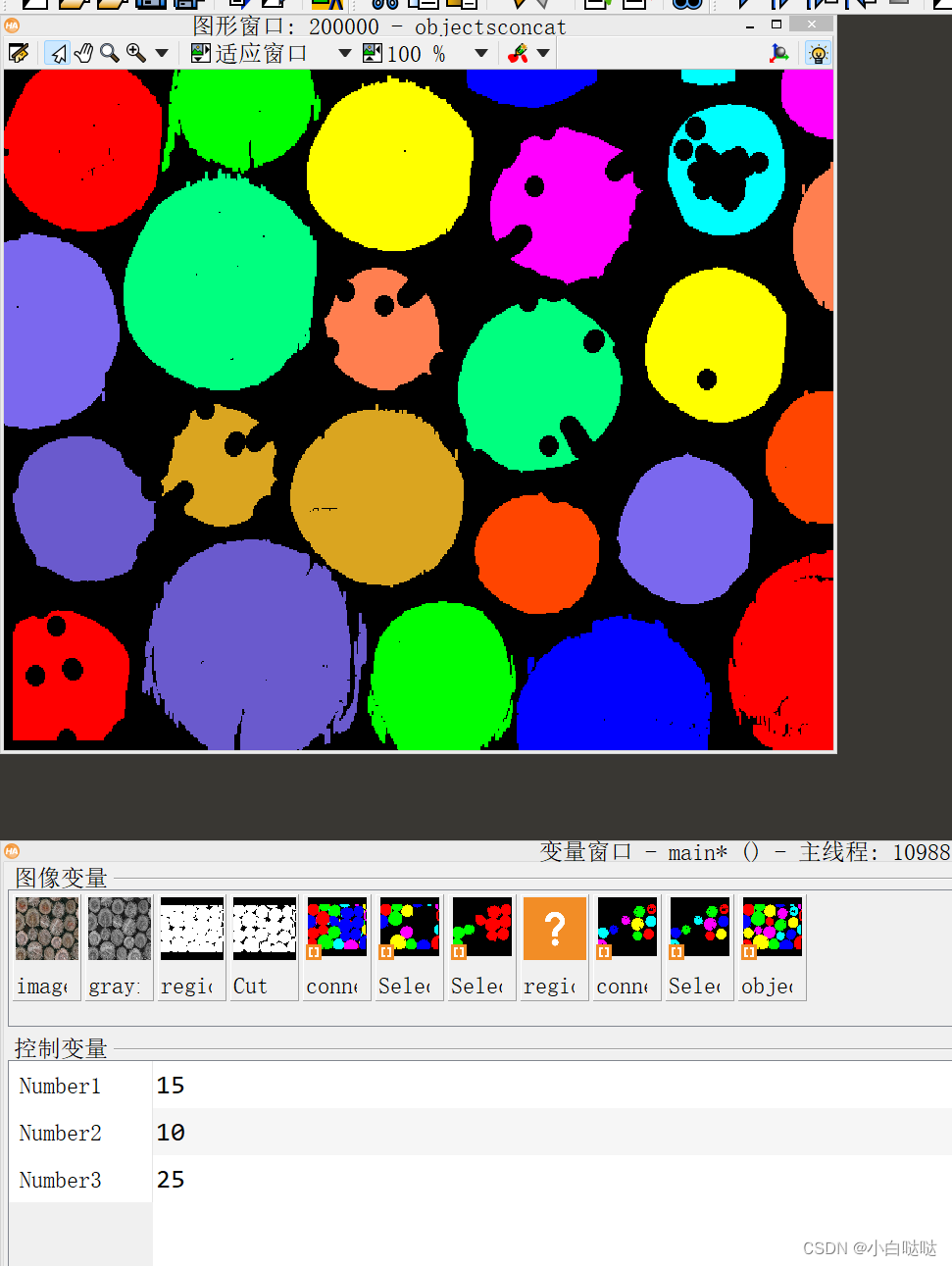
halcon学习-blob分析统计木材个数
本文用到的主要算子简单介绍如下: 1、矩形结构开运算opening_rectangle1(); 2、圆形结构腐蚀运算erosion_circle(); 3、统计非连通区域个数count_obj(); 4、合并非连通区域concat_obj();
*读取图像
read_image(image,../wood.jpg)
*图像转灰度
rgb1_to_gray(image,…

可视可交互!在全志H618上用OpenCV读取图像显示到PyQt5窗口上
OpenCV能够处理图像、视频、深度图像等各种类型的视觉数据,在某些情况下,尽管OpenCV可以显示窗口,但PyQt5可能更适合用于创建复杂的交互式应用程序,而自带GPU的H618就成为了这些图像显示的最佳载体。
这里分享一个代码࿰…
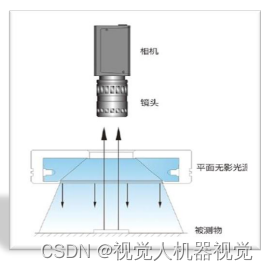
机器视觉系统选型-穹顶光源,方形无影光源,平面无影光源及应用场景
穹顶光源 利用圆顶形状的反射板均匀照射漫射光
磨砂面的刻印、损伤检测金属、玻璃等表面反光较强物体的表面检测印刷检测凹凸不平面的外观检测 方形无影光源 从四个方向照射低角度漫射光电子零件字符识别金属表面划伤检测烟盒表面检测 平面无影光源 从平坦的发光面照射漫射光表…

机器视觉工程师,没有错误
记住,在生活中,自己要会享受。在工作,做到一丝不苟。在技术上,追求精益。
人生不是那么一帆风顺,更不是坎坎坷坷,希望你们是曲折上升的,虽不能大富大贵,只要自己努力完全可以小康。…

海康Visionmaster-通讯管理:ModBus 通信发送非整型 数据的方法
Modbus 通信发送数据只能为 Int 类型,如下图所示:
可以发送 Int 和 Float 数据,如下图所示 通信设备配置如下: 发送事件配置如下: 通信管理界面显示有问题,显示为 Int 类型存在一定误导;可以…

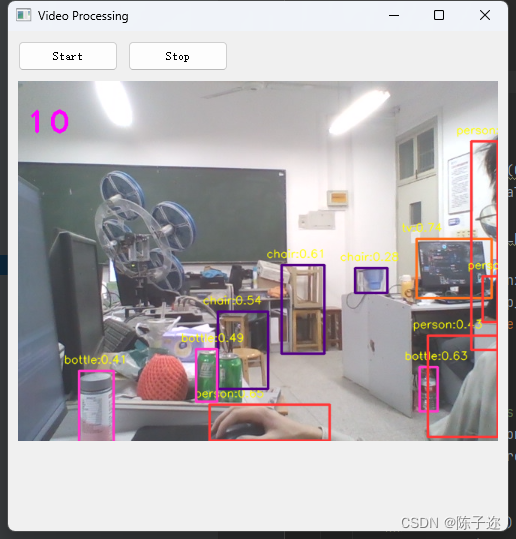
PyQt界面里如何加载本地视频以及调用摄像头实时检测(小白入门必看)
目录
1.PyQt介绍
2.代码实现 2.1实时调用摄像头
2.2 使用YOLOv5推理
2.3 代码中用到的主要函数 1.PyQt介绍
PyQt是一个用于创建桌面应用程序的Python绑定库,它基于Qt框架。Qt是一个跨平台的C应用程序开发框架,提供了丰富的图形界面、网络通信、数据…
Halcon不改变目标大小尺寸及坐标,放大图像或区域
如果需要检测一张图像中很细小的物体,计算机可能可以观察到,但人的肉眼很难判别。这时候就需要放大图像中目标所在区域进行观测,放大观察可能会导致图像被放大,目标相对原始图像的坐标大小信息会被改变。如下,分割图中…

【文献阅读笔记】关于GANomaly的异常检测方法
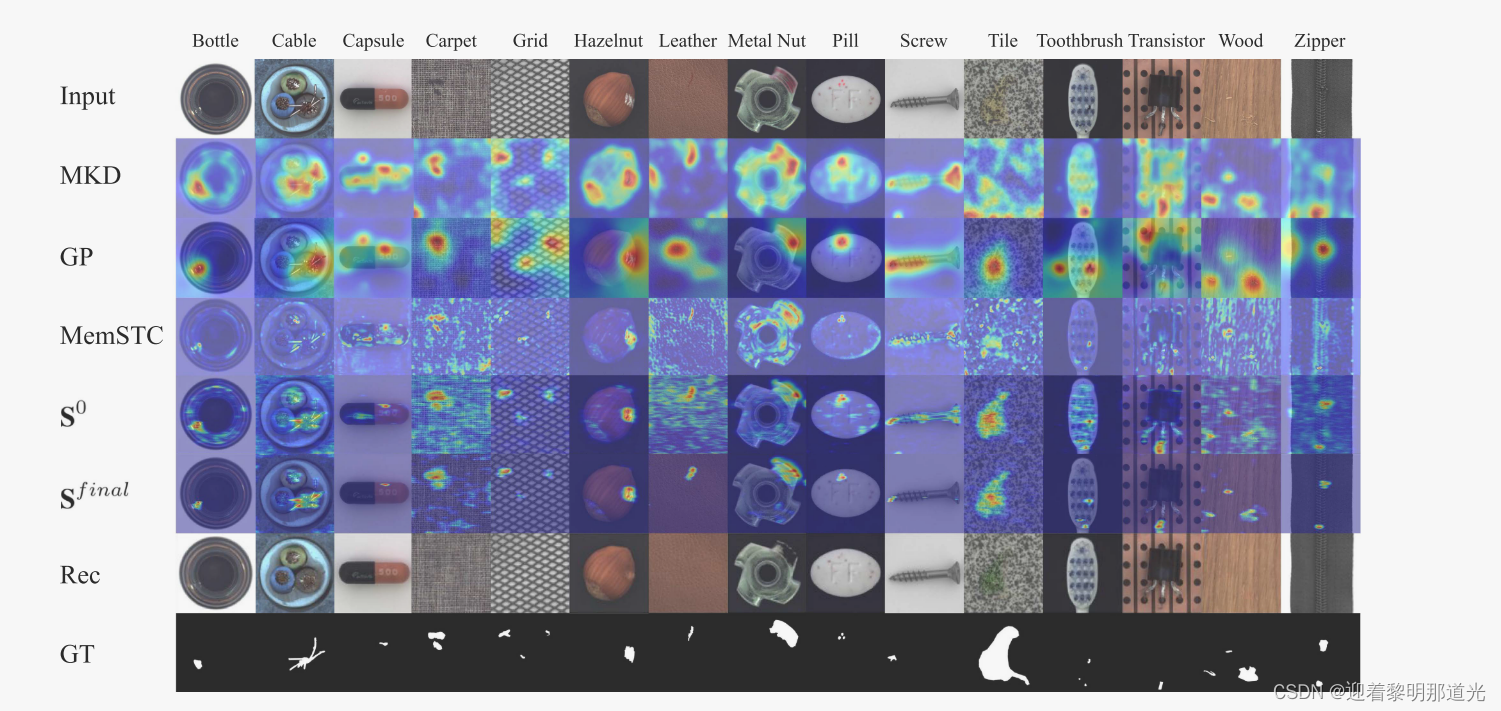
文章目录 1、GANomaly: Semi-Supervised Anomaly Detection via Adversarial Training模型主要创新 2、Skip-GANomaly: Skip Connected and AdversariallyTrained Encoder-Decoder Anomaly Detection模型主要创新点 3、Industrial surface defect detection and localization u…
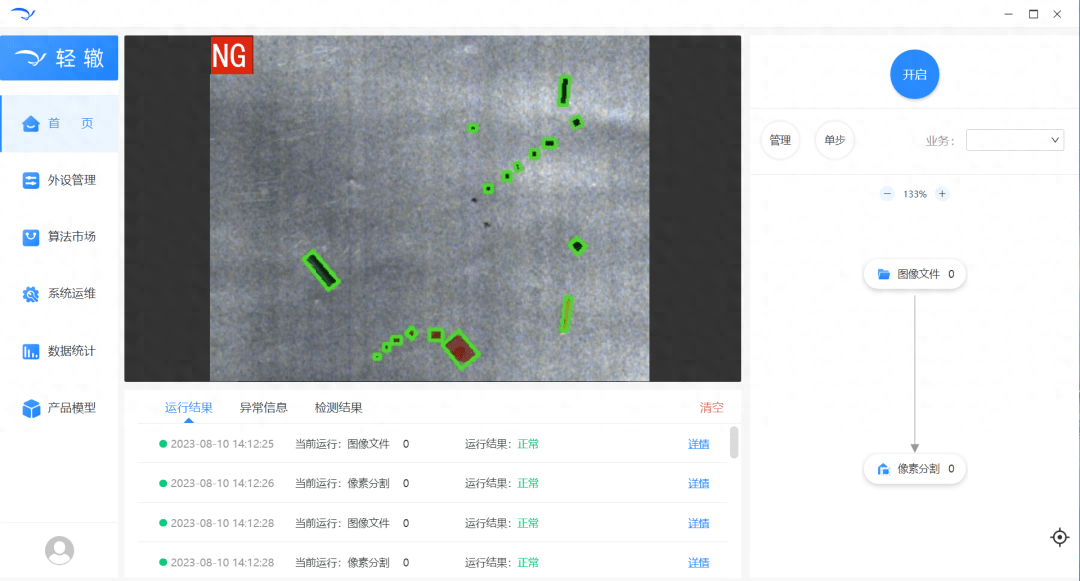
深眸科技|轻辙视觉引擎以99.9%视觉检测能力为基准,赋能木材加工
轻辙视觉引擎:轻辙视觉引擎是以低代码为基础,深度学习技术为核心的视觉业务流程编排引擎,用于快速搭建部署复杂视觉检测流程软件方案。
轻辙视觉引擎|轻量级产品实现高效应用
作为深眸科技的核心产品之一,轻辙视觉引…

CogVLM大模推理代码详细解读
文章目录 前言一、参数介绍1.cogvlm-grounding-generalist参数介绍 二、模型构建1、创建主函数(get_model)2、调用sat库模型构建函数(base_model.py)3、模型类构建模型(self.add_mixin)4、整体结构5、模型运行结果 三、CogVLM推理源码解读1、推理整体代码2、CogVLMModel.from_p…
展会直击 | 昂视精彩亮相CIBF2023深圳国际电池展
5月16日,CIBF2023深圳国际电池展在深圳国际会展中心(宝安新馆)正式开幕,昂视携2D视觉产品、3D视觉产品、锂电行业智能检测方案亮相9号馆T101-2展位,会场氛围火热,昂视展位人声鼎沸。 方案演示,助…
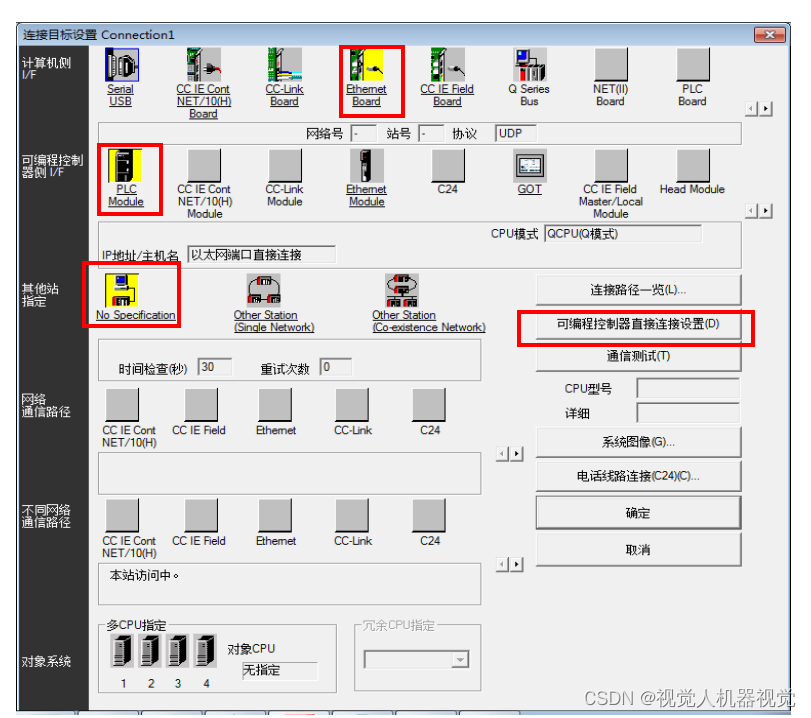
康耐视智能相机IS2000与三菱PLC走MC协议通讯设置详细步骤及案例详解
1.IS2000(SLMP扫描界面)设置如下: 控制器类型:PLC型号 IP地址:PLC地址 主机端口:16进制下的PLC通讯端口 2、IS2000设备寻址界面设置如下: 六大控制块存放区域根据PLC设定,偏移量及设备数可更改。3.打开GX WORKS软件,选择新建工程,点击“确定”,界面如下: 4.点击“连…
Baumer工业相机堡盟工业相机如何通过BGAPISDK使用HDR功能(C#)
Baumer工业相机堡盟工业相机如何通过BGAPISDK使用HDR功能(C#) Baumer工业相机Baumer工业相机BGAPISDK和HDR功能的技术背景Baumer工业相机通过BGAPISDK使用HDR功能1.引用合适的类文件2.通过BGAPISDK使用HDR高动态范围功能3.通过BGAPISDK关闭HDR高动态范围…
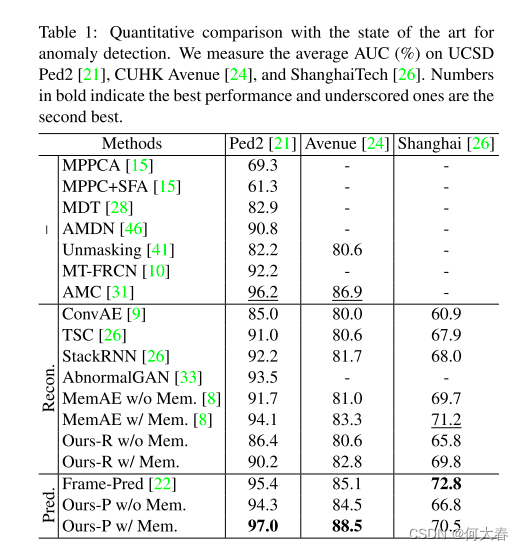
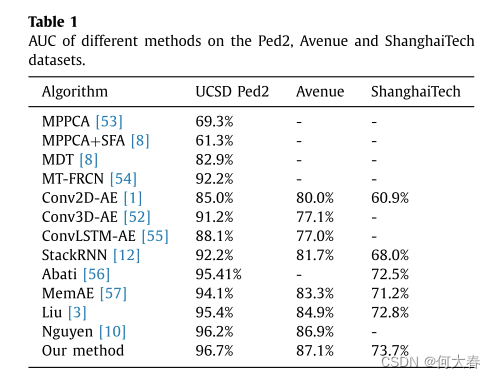
Learning Memory-guided Normality for Anomaly Detection 论文阅读
Learning Memory-guided Normality for Anomaly Detection 摘要1.介绍2.相关工作3.方法3.1网络架构3.1.1 Encoder and decoder3.1.2 Memory 3.2. Training loss3.3. Abnormality score 4.实验5.总结总结&代码复现: 文章信息: 发表于:cvpr…
计算摄像技术01 - 摄像技术基础知识
一些计算摄像技术知识内容的整理:传统摄像技术中的快门和曝光、图像信号格式。 目录
一、传统摄像技术中的快门和曝光
(1)快门速度
(2)光圈
(3)景深
(4)曝光
二、图…
Baumer工业相机堡盟工业相机软件CameraExplorer常见功能使用说明一
Baumer工业相机堡盟工业相机软件CameraExplorer常见功能使用说明一 Baumer工业相机Baumer工业相机图像采集功能Baumer工业相机图像基本参数设置 Baumer工业相机
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、…
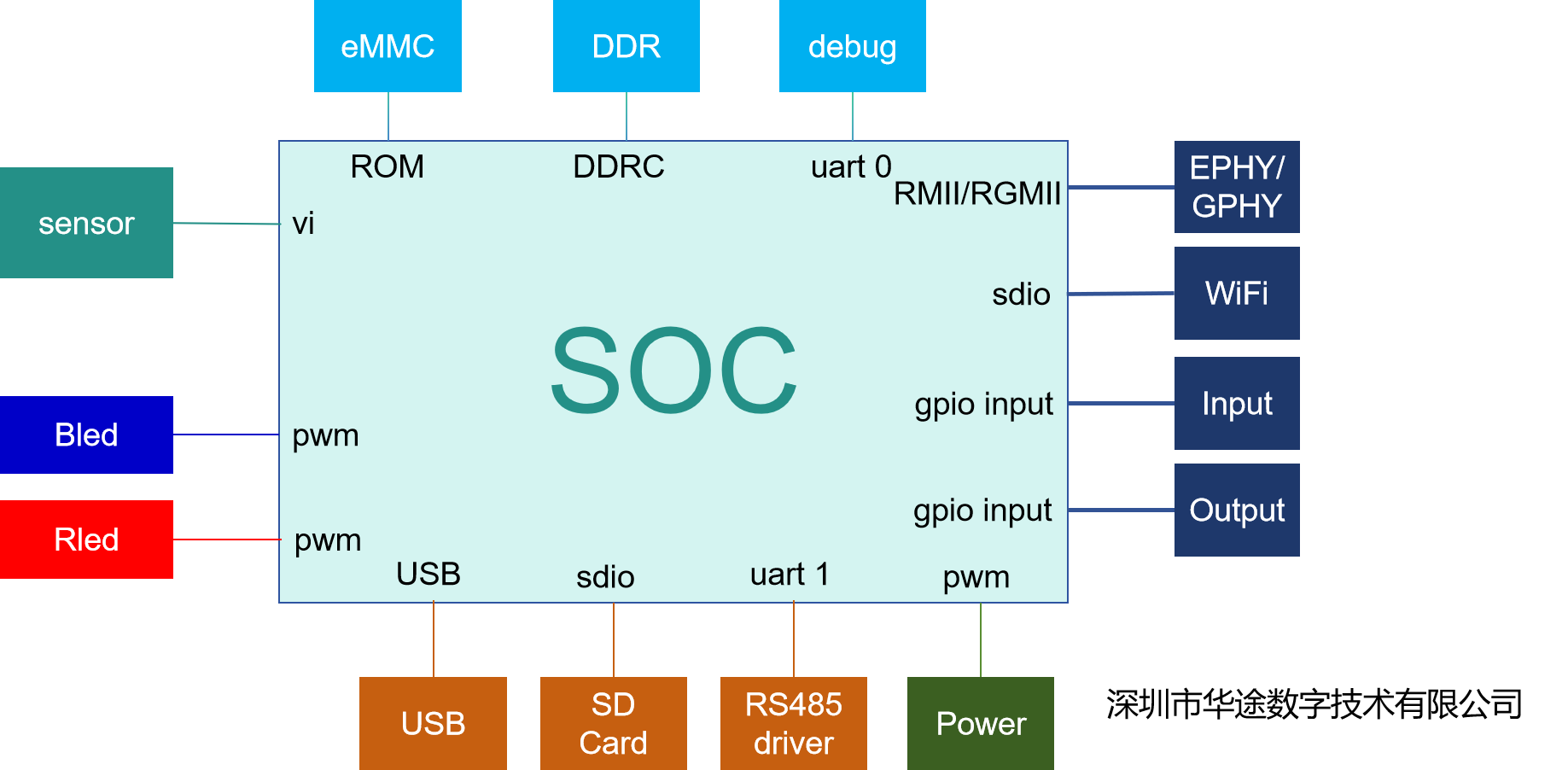
海思越影系列3516DV500/3519DV500/3519AV200/SD3403平台的AI一体化工业相机设计思路
随着工业自动化的发展,生产线对机器视觉的数量要求越来越多,由于数量的增加,视觉系统占的空间也越来越大,给生产线的布局带来困扰。 另一方面随着视觉SOC的发展,越来越多的视觉SOC都逐渐带有一定的算力,一体…
深眸科技聚焦3D机器视觉技术,从技术形态到应用前景实现详细分析
机器视觉技术的不断升级,使得对二维图像的处理逐渐扩展到了更复杂的三维领域,形成了3D机器视觉。3D机器视觉是机器视觉的重要应用领域之一,通过计算机能够在短时间内处理视觉传感器采集的图像信号,从而获得目标对象的三维信息。
…
Baumer工业相机堡盟工业相机如何通过BGAPISDK获取相机的各种信息如SN/ID等等(C#)
Baumer工业相机堡盟工业相机如何通过BGAPISDK获取相机的各种信息如SN/ID等等(C#) Baumer工业相机Baumer工业相机通过SDK获取相关生产信息的技术背景通过SDK获取相机信息的代码分析获取Baumer工业相机相关信息Baumer工业相机相关参数信息获取的测试 Baume…

基于单目相机的2D测量(工件尺寸和物体尺寸)
目录 1.简介
2.基于单目相机的2D测量
2.1 想法:
2.2 代码思路
2.2 主函数部分 1.简介
基于单目相机的2D测量技术在许多领域中具有重要的背景和意义。 工业制造:在工业制造过程中,精确测量是确保产品质量和一致性的关键。基于单目相机的2…
视觉检测系统在半导体行业的应用
一、半导体产业链概述 半导体产业链是现代电子工业的核心组成部分,涵盖了从原材料到最终产品的整个生产过程。这个产业链主要分为以下几个环节: 1.原材料供应:半导体行业的基石是半导体材料,如硅片、化合物半导体等。这些材料需要…
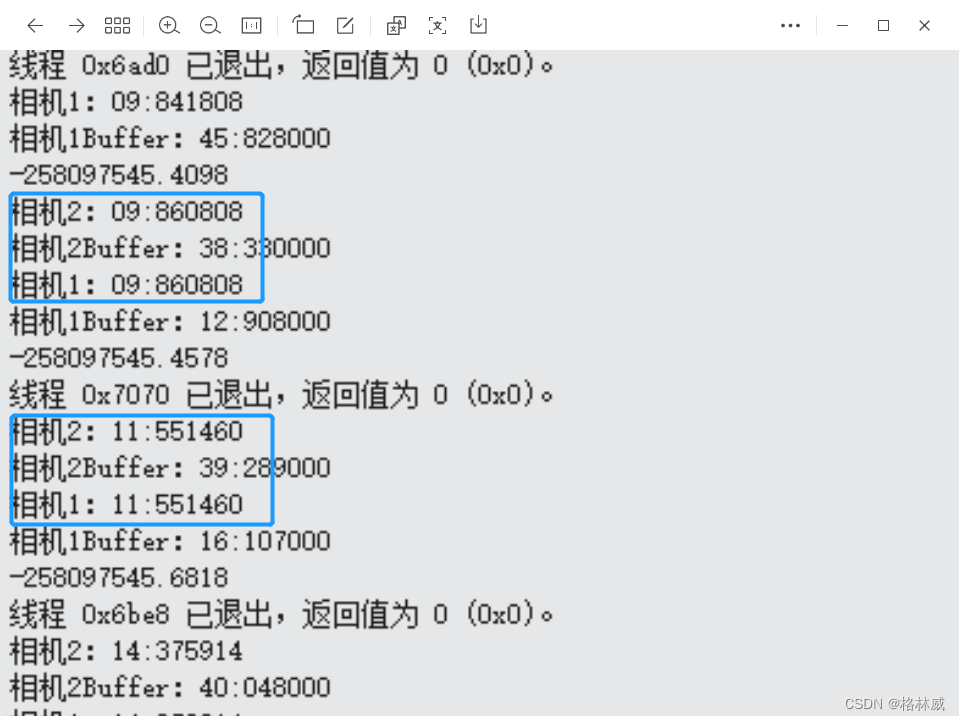
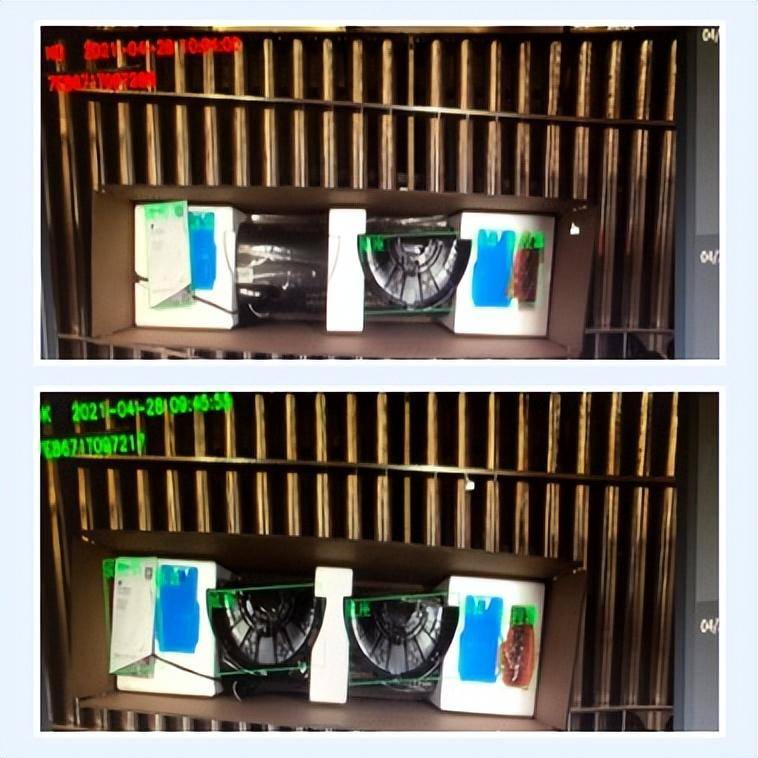
Baumer工业相机堡盟工业相机如何使用BGAPI SDK解决两个万兆网相机的同步采集不同步的问题
Baumer工业相机堡盟工业相机如何使用BGAPI SDK解决两个万兆网相机的同步采集不同步的问题 Baumer工业相机Baumer工业相机图像数据转为Bitmap的技术背景Baumer同步异常 :客户使用两个Baumer万兆网相机进行同步采集发现FrameID相同,但是图像不同步细节原因…

学上位机迎来最好的时代
学上位机迎来最好的时代很多人会疑问,我PLC做得好好的,
为什么要去学上位机?一提到上位机,大多数人
第一时间只是会联想到编程,
认为这是程序员才会去做的事情。英国牛津大学研究称,未来20年
英国35%现有工…

Halcon——关于halcon中的一些语法
Halcon——关于halcon中的一些语法前言一、变量的创建与赋值二、if语句三、for语句四、while语句五、中断语句六、switch语句总结前言
在HDevelep环境下编程时,所用的一些语法与C#有些差异,在此做下记录。 一、变量的创建与赋值
Hdevelep中调用函数时&…
Vision Pro 自己写的一些自定义工具(c#)
目录前言一、保存图片工具1、展示2、源码下载地址二、3D图片格式转化1、展示2、源码下载地址三、所有工具汇总下载地址前言
自己用c#写的一些visionPro自定义工具,便于使用的时候直接拿出来,后续会不断添加新的工具。
想看怎么使用c#写visionPro自定义…

机器视觉表面划痕检测流程
表面缺陷检测常见的检测主要有物体表面的划痕、污渍、缺口、平面度、破损、边框对齐度、物体表面的亮度、皱纹、斑点、孔等。
表面缺陷检测设备凝聚了机器视觉领域的许多技术成果,吸取了许多创新的检测理念,可以与现有生产线无缝对接检测,也…

C#视觉检测-模板匹配
前几天一个学员在学习C#与视觉交互时,也不知道视觉可以用来做什么 。下面我们就详细讲讲C# 和视觉交互的相关知识。
C#和Halcon的视觉交互在工业生产和智能制造领域中得到了广泛应用。其中,模板匹配是一种简单但有效的图像处理技术,可以用于检测和定位物…
Baumer工业相机堡盟工业相机如何使用新版本NEOAPI SDK控制相机数据流的开启和关闭(C++)
Baumer工业相机堡盟工业相机如何使用新版本NEOAPI SDK控制相机数据流的开启和关闭(C) Baumer工业相机Baumer工业相机NEOAPI SDK的技术背景Baumer工业相机使用NEOAPISDK控制相机数据流的方式1.引用合适的类文件2.使用NEOAPISDK控制相机数据流的方式2.使用…
Baumer工业相机堡盟工业相机如何通过BGAPISDK将相机图像由Mat转为Qimage(C++)
Baumer工业相机堡盟工业相机如何通过BGAPISDK将相机图像由Mat转为Qimage(C)(C) Baumer工业相机Baumer工业相机BGAPISDK和Mat转为Qimage的技术背景Baumer工业相机通过BGAPISDK将相机图像Mat转为Qimage功能1.引用合适的类文件2.通过…
视觉检测系统是怎么检测尺寸的?
随着科学技术的进步和市场通知的发展越来越多的自动化机器正在代替人工。 视觉检查系统也是如此。
视觉检测系统在许多行业的应用越来越热衷。 如工业五金. 3c电子.纺织等行业。 那么,具体而言,什么是视觉尺寸检测呢?
1 .什么是尺寸检查&am…
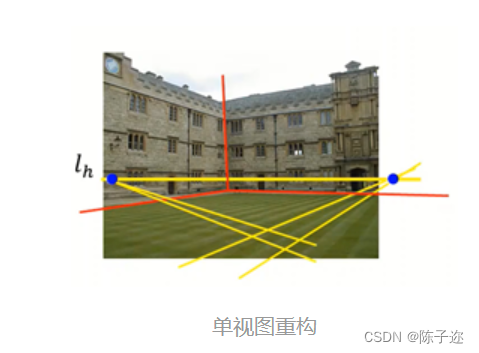
双目视觉实战--单视图测量方法
目录 一.简介
二、2D变换
1. 等距变换(欧式变换)
2. 相似变换
3. 仿射变换
4. 射影变换(透视变换)
5. 结论
三、影消点与影消线
1. 平面上的线
2. 直线的交点
3. 2D无穷远点
4. 无穷远直线
5. 无穷远点的透视变换与仿…
机器视觉我能学会吗?
Halcon-3D官方自带案例显示效果 经常有视觉人粉丝问我,我可以学会机器视觉。我正常不会立刻说可以。 首先粉丝提出这个问题的时候,粉丝的心里,应该受过打击,在质疑自己,自卑且非常不自信。 我必须了解他。他的学历,他的现在是否工作,职业,出生地…。接着语音建立互信,…
工业机器视觉缺陷检测工作小结
工业机器视觉检测工作小结 (因为网上没有很系统的讲义和文档,都是零零散散的,因此,我自己尝试着总结一下、仅供参考) 你想知道的大概率在这都可以找到、相机的了解镜头的了解光源的了解传统算法DL深度学习方法 &#…
案例分享 | 纽扣电池石墨片厚度及缺陷检测
石墨片是一种导热散热材料,质轻柔软,能够轻松贴合在各种热源点,在新能源、航天、3C电子等领域应用广泛。
汽车钥匙中的纽扣电池也需要使用石墨片,石墨片会有统一的厚度标准,装配过程中表面不可避免地会出现裂纹、划痕…
Baumer工业相机堡盟工业相机如何联合BGAPISDK和Halcon实现图像的Pow伽马变换算法增强(C#)
Baumer工业相机堡盟工业相机如何联合BGAPISDK和Halcon实现图像的Pow伽马变换算法增强(C#) Baumer工业相机Baumer工业相机使用图像算法增加图像的技术背景Baumer工业相机通过BGAPI SDK联合Halcon使用Pow伽马变换增强算法1.引用合适的类文件2.BGAPI SDK在图…
Baumer工业相机堡盟工业相机使用BGAPI SDK将图像数据转换为Bitmap的几种方式(C#)(RGB)
[TOC](Baumer工业相机堡盟工业相机使用BGAPI SDK将图像数据转换为Bitmap的几种方式(C#)(RGB))
Baumer工业相机
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计数和识别、运动分析和图…
机器视觉工程师,如何快速找到女朋友攻略(不提供海王模式,需要的朋友得加钱)
视觉人机器视觉培训-缺陷检测项目-食品行业草鸡蛋外观检测 找女朋友,千万不要"守株待兔",更重要的是"主动出击"。 本群主,本UP主,正经人。 某粉丝:你不能出一次差 在当地找一个嘛 我对以上行为坚决不支持, 第一:犯法行为做不得 第二:对自己爱人不忠…
工业视觉检测的8个技术优势
工业4.0时代,自动化生产线成为了这个时代的主旋律,而工业视觉检测技术也成为其中亮眼的表现,其机器视觉技术为设备提供了智慧的双眼,让自动化的脚步得以加速!
在实际的生产应用中,视觉技术方案往往先被着手…

3D-LaneNet+: Anchor Free Lane Detection using a Semi-Local Representation
动机:
对3D-LaneNet的改进; 特点 semi-local tile representation: breaks down lanes into simple lane segments whose parameters can be learnt 【CC】网格化,基于每个网格去学习Lane的特征;最后再通过NN合起来&a…
Baumer工业相机堡盟工业相机软件CameraExplorer常见功能使用说明二
Baumer工业相机堡盟工业相机软件CameraExplorer常见功能使用说明二 Baumer工业相机Baumer工业相机CE软件图像/视频存储功能Baumer工业相机CE软件记录日志文件功能Baumer工业相机CE软件查看图像Buffer及数据流统计信息 Baumer工业相机
Baumer工业相机堡盟相机是一种高性能、高质…
【视觉检测】使用opencv编写一个图片缺陷检测流程
1. 导入必要的库,如OpenCV,NumPy等。
2. 使用OpenCV读取图像,并将其转换为灰度图像。
3. 使用OpenCV的Canny边缘检测算法检测图像中的边缘。
4. 使用OpenCV的Hough变换算法检测图像中的线条。
5. 使用OpenCV的模板匹配算法检测图像中的缺…
如何运行YOLOv6的代码实现目标识别?
YOLOv6是由美团视觉团队开发的1.环境配置我们先把YOLOv6的代码clone下来git clone https://github.com/meituan/YOLOv6.git安装一些必要的包pip install pycocotools2.0作者要求pytorch的版本是1.8.0,我的环境是1.7.0,也是可以正常运行的pip install -r requirement…

捉摸不“定”?昂视赋能锂电池精准焊接
我国新能源汽车产业正由政策驱动向市场主导转变,动力电池产业市场化竞争日趋激烈。在电动汽车选购关注点中,电池的续航里程、质保期、更换成本等因素是消费者密切关注的问题,其中,电池的实际续航里程更是备受瞩目。锂电池生产工艺…

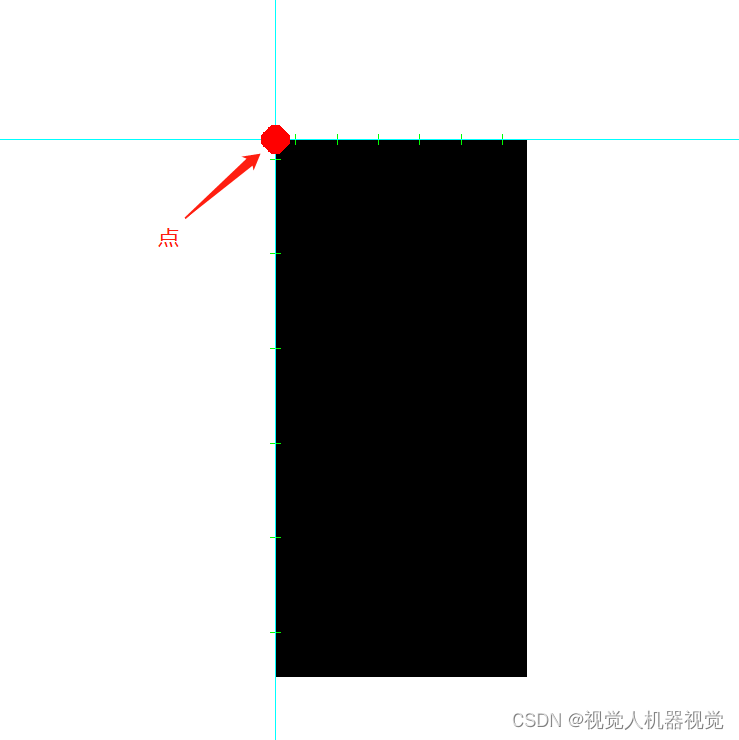
Linux下查看图片中某点的像素X、Y坐标
在做目标检测、目标追踪的任务过程中,我们会用到一些开源的数据集,比如MOT16多目标追踪数据集。这些数据集会提供数据标注文件gt.txt,里面的内容如下1,1,912,484,97,109,0,7,12,1,912,484,97,109,0,7,13,1,912,484,97,109,0,7,14,1,912,484,97,109,0,7,1…

3D Packing for Self-Supervised Monocular Depth Estimation
动机:
propose a novel self-supervised monocular depth estimation method combining geometry with a new deep network 【CC】混合了几何特性的(就是后面的视锥模型)的自监督的单目深度估计网络
创新点
Our architecture leverages no…
Baumer工业相机堡盟工业相机如何通过BGAPISDK使用BGAPI2.Buffer转BGAPI2.Image功能(C++)
Baumer工业相机堡盟工业相机如何通过BGAPISDK使用BGAPI2.Buffer转BGAPI2.Image功能(C) Baumer工业相机Baumer工业相机BGAPISDK和图像转换的技术背景Baumer工业相机BGAPI2.Buffer转BGAPI2.Image功能1.引用合适的类文件2.通过BGAPISDK将BGAPI2.Buffer转BGA…
YOLOv8详解全流程捋清楚-每个步骤
从第一步,到最后一步,带着你捋
整体架构 Backbone: Feature Extractor提取特征的网络,其作用就是提取图片中的信息,供后面的网络使用 Neck : 放在backbone和head之间的,是为了更好的利用backbo…
利用Halcon绘制ROI区域或Mask区域
利用Halcon绘制ROI区域或Mask区域 概述内容补充参考老版本的ROI绘制(Halcon 12-17) 概述
ROI是Halcon中的一个很重要的概念,为了减少计算量,只关注待检测物体或该物体周围的一片区域即可,ROI就是图像处理所关注的区域…
建材陶瓷片机器视觉定位软硬件方案
【检测目的】
建材陶瓷片机器视觉定位 【检测要求】
精度0.02mm
产品大小:60mm—70mm
颜色为:白、绿两种
5S图像处理时间 【拍摄效果图一】 上料位 【拍摄效果图二】 上料位 【拍摄效果图三】 上料位 【拍摄效果图四】 上料位 【硬件配置】 外框 …
Baumer工业相机堡盟工业相机如何通过BGAPISDK里工具函数来计算工业相机的实时帧率(C++)
Baumer工业相机堡盟工业相机如何通过BGAPISDK里工具函数来计算工业相机的实时帧率(C)Baumer工业相机Baumer工业相机的帧率的技术背景Baumer工业相机的帧率计算方式在BufferEvent声明显示FrameID设计显示帧率的函数Baumer工业相机通过BGAPI SDK计算帧率的…
Halcon: (示例 1)OCR 字符识别
目录
示例
涉及算子描述
text_line_orientation
hom_mat2d_identity
hom_mat2d_rotate
affine_trans_image
dots_image
reduce_domain
vector_angle_to_rigid
binary_threshold
dilation_rectangle1
union1
shape_trans
partition_rectangle
intersection
par…
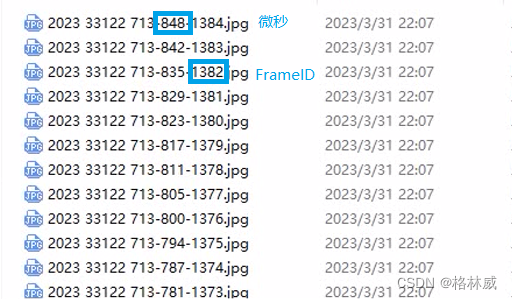
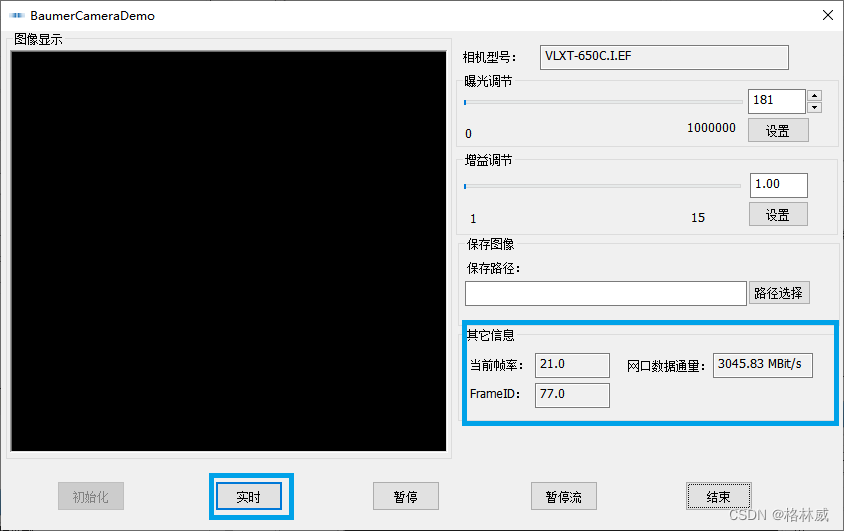
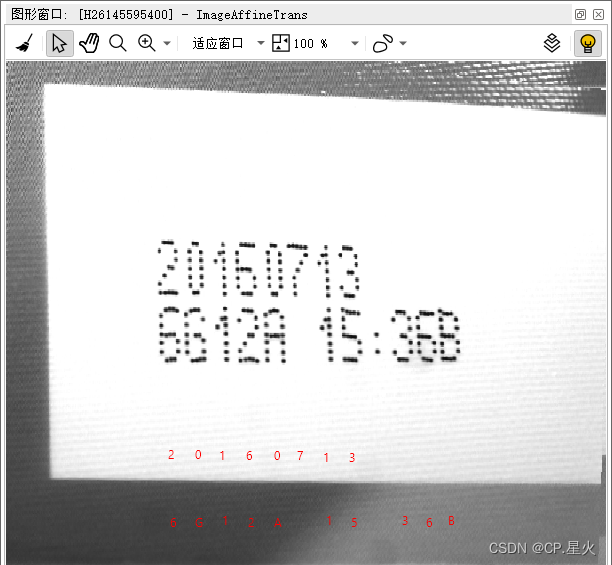
Baumer工业相机堡盟工业相机如何通过BGAPI SDK获取每张图像的微秒时间和FrameID(C++)
BGAPI SDK获取图像微秒级时间和FrameID Baumer工业相机Baumer工业相机FrameID技术背景一、FrameID是什么?二、使用BGAPI SDK获取图像微秒时间和FrameID步骤 1.获取SDK图像微秒级时间2.获取SDK图像FrameIDBaumer工业相机使用微秒级时间和FrameID保存的用处Baumer工业…
ObjectBox一种基于中心点的无锚点目标检测方法
ObjectBox: From Centers to Boxes for Anchor-Free Object Detection
论文地址:https://arxiv.org/pdf/2207.06985.pdf 官方代码:https://github.com/MohsenZand/ObjectBox 基于中心点的无锚点目标检测方法是一种目标检测方法,其思路是将目…
3D视觉碰撞PIN针检测,且看昂视如何赋能
PIN针是连接器中用来完成电(信号)的导电(传输)的一种金属物质,作为电流或信号连接的关键元件,被广泛应用于各行各业,大到国防、飞机、汽车,小到洗衣机、电视、手机等,市场…

Baumer工业相机堡盟工业相机如何联合BGAPI SDK和OpenCVSharp实现Mono12和Mono16位深度的图像保存(C#)
Baumer工业相机堡盟工业相机如何联合BGAPI SDK和OpenCVSharp实现Mono12和Mono16位深度的图像保存(C#) Baumer工业相机Baumer工业相机保存位深度12/16位图像的技术背景代码案例分享1:引用合适的类文件2:BGAPI SDK在图像回调中联合O…

每日学术速递4.19
CV - 计算机视觉 | ML - 机器学习 | RL - 强化学习 | NLP 自然语言处理 Subjects: cs.CV
1.Visual Instruction Tuning 标题:可视化指令调优
作者:Haotian Liu, Chunyuan Li, Qingyang Wu, Yong Jae Lee
文章链接:https://arxiv.org/ab…
案例分享 | 汽车电机控制箱螺钉浮高检测
电机控制器是通过主动工作来控制电机按照设定的方向、速度、角度、响应时间进行运动的集成电路,日常生活中的洗衣机、冰箱、印刷机等设备都需要电机控制器来控制其运行工作,是各种机械设备中不可或缺的部件。
在电动车辆中,电机控制器也是关…
会议回顾!2023机器视觉在线研讨会圆满结束
4月20日下午,持续两小时的“融合生态,让制造与视俱进”2023机器视觉在线研讨会圆满结束,此次会议联合机器视觉产业链上中下游厂商,共同分享工业机器视觉领域最新技术和应用案例,专题讲解与观众问答相互交织,…

人群计数数据集汇总和详细介绍,全网最全,crowd counting datasets
Crowd Counting数据集汇总
视频监控video surveillance
https://github.com/gjy3035/Awesome-Crowd-Counting/blob/master/src/Datasets.md进展 | 密集人群分布检测与计数 :https://www.sohu.com/a/338406719_823210
Free-view
2022_Pedestrian Attribute Recognition
htt…

【机器视觉2】单目相机内外参数标定
单目相机内外参数标定 1. 标定参照物概述2. 张正友平面模板标定法 1. 标定参照物概述
标定相机内外参数需要获取场景和图像间多个坐标对。场景坐标点直接从标定参照物获取,图像坐标点从图像中获取。 标定参照物有二维、三维等,如下图所示: …
CIBF2023深圳电池展圆满结束!昂视期待与您下次相会
5月18日,CIBF2023深圳电池展圆满结束,展会为期三天,各位参展商展示了最新技术与产品,并在展位上开展花式互动,现场气氛火热。
作为电池行业的权威展会,CIBF2023深圳电池展为国内外用户、采购商、经销商提供…

Baumer工业相机堡盟工业相机如何通过BGAPI SDK设置自动亮度调整BrightnessAuto(自动曝光自动增益)(C++)
自动亮度调整项目场景
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计数和识别、运动分析和图像处理。
Baumer的万兆网相机拥有出色的图像处理性能,可以实时传输高分辨率图像。此外࿰…
Baumer工业相机堡盟工业相机如何联合BGAPISDK和Halcon实现图像的线性灰度变换ScaleImage算法增强(C#)
Baumer工业相机堡盟工业相机如何联合BGAPISDK和Halcon实现图像的线性灰度变换算法增强(C#) Baumer工业相机Baumer工业相机使用图像算法增加图像的技术背景Baumer工业相机通过BGAPI SDK联合Halcon使用线性灰度变换增强算法1.引用合适的类文件2.BGAPI SDK在…
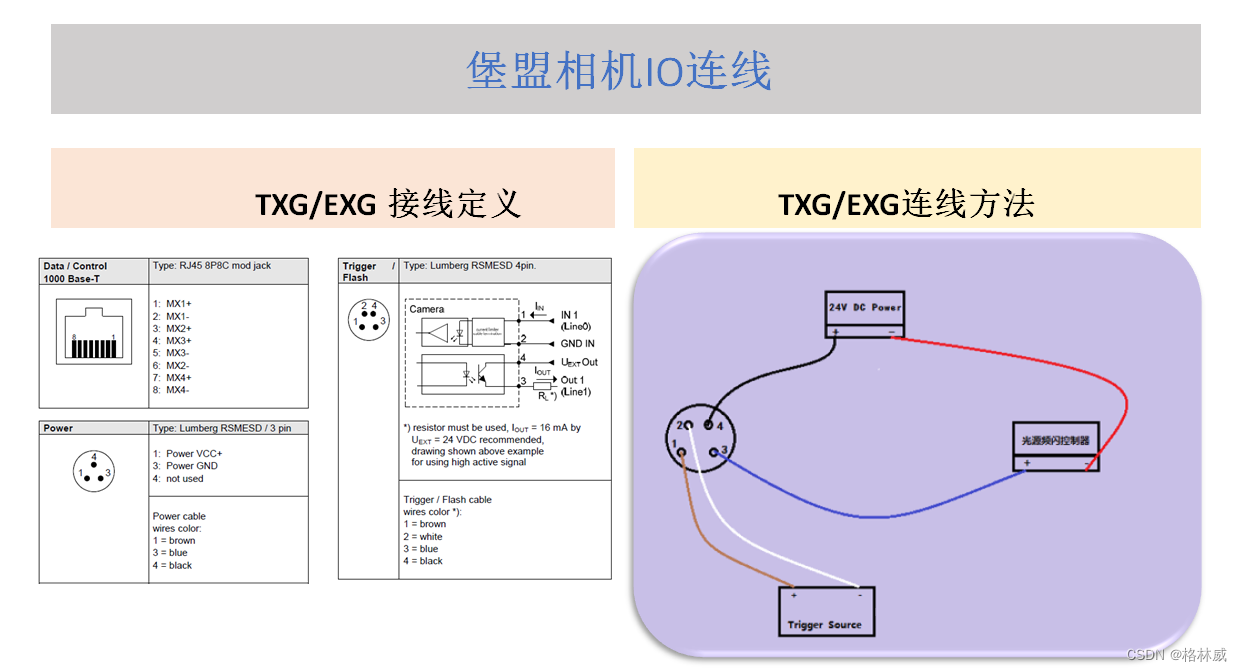
Baumer工业相机堡盟工业相机IO介绍与配置(二)
Baumer工业相机堡盟工业相机IO介绍与配置(二) Baumer工业相机Baumer工业相机IO的功能Baumer工业相机IO的作用Baumer工业相机IO上点连线方法 Baumer工业相机
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景&#…
Baumer工业相机堡盟工业相机使用BGAPISDK将工业相机设为Burst模式以及该模式的优势以及行业应用(C++)
Baumer工业相机堡盟工业相机使用BGAPISDK将工业相机设为Burst模式以及该模式的优势以及行业应用(C) Baumer工业相机Baumer工业相机的Burst模式的技术背景Baumer工业相机使用BGAPISDK将设置Burst模式1.引用合适的类文件2.使用BGAPI SDK初始化相机设置Burs…
Baumer工业相机堡盟工业相机通过BGAPISDK使用图像回调函数全帧率保存图像(C++)
Baumer工业相机堡盟工业相机通过BGAPISDK使用图像回调函数全帧率保存图像(C) Baumer工业相机Baumer工业相机全帧率保存的技术背景Baumer工业相机通过BGAPISDK使用相机图像回调函数1.引用合适的类文件2.通过BGAPISDK在相机图像回调函数全帧率保存 Baumer工…
目标检测数据预处理——非宫格与宫格混合拼图(大宽高比图片)
之前一直用的是宫格的正方形拼图,但比如对“人”框的截图是这种高宽高比的长方形图片,按照最大边resize最小边等比例缩放后放入宫格中对造成最小边resize太多,整体图片缩小很多。所以本片专门针对高宽高比的图片拼图进行编辑。 本篇的拼图方式…
Baumer工业相机堡盟工业相机使用BGAPI SDK将图像数据转换为Bitmap的几种方式(C++)(RGB)
Baumer工业相机堡盟工业相机使用BGAPI SDK将图像数据转换为Bitmap的几种方式(C)(RGB) Baumer工业相机Baumer工业相机图像数据转为Bitmap的技术背景Baumer工业相机使用BGAPISDK将图像数据转换为Bitmap的几种方式1.引用合适的类文件…
![基于YOLOv5+C3CBAM+CBAM注意力的海底生物[海参、海胆、扇贝、海星]检测识别分析系统](https://img-blog.csdnimg.cn/img_convert/df21899986d75fb72e8d3291ac8b7a60.png)
基于YOLOv5+C3CBAM+CBAM注意力的海底生物[海参、海胆、扇贝、海星]检测识别分析系统
在我前面的一些文章中也有用到过很多次注意力的集成来提升原生检测模型的性能,这里同样是加入了注意力机制,区别在于,这里同时在两处加入了注意力机制,第一处是讲CBAM集成进入原生的C3模块中,在特征提取部分就可以发挥…
蔬菜视觉分拣机器人的设计与实现(RoboWork参赛方案)
蔬菜视觉分拣机器人的设计与实现 文章目录蔬菜视觉分拣机器人的设计与实现1. 技术栈背景2. 整体设计3. 机械结构3.1 整体结构3.2 底座结构3.3 小臂结构3.4 大臂结构3.5 负载组件结构3.6 末端执行器结构4. 硬件部分4.1 视觉系统4.1.1 光源4.1.2 海康工业相机4.2 传送带系统4.2.1…

大专生,本科生,正在成为求职市场最尴尬的存在-我反对此言论,因为高成本,低科技,低利润产业将是中国未来五十年的主要特点
有很多视觉人机器视觉粉丝咨询我,我大专生可以学机器视觉开发吗?
我这里回答下:可以,你要自信点,下三年苦功夫,去学习,去专研,去找一个好点公司平台或者好点的培训机构。
学历不是评价一个人的唯一标准,但是它一直是社会对个人综合素质和知识储备的一种重要衡量标准…
Baumer工业相机堡盟工业相机如何通过BGAPISDK显示彩色相机和黑白相机的图像(C#)
Baumer工业相机堡盟工业相机如何通过BGAPISDK里显示彩色相机和黑白相机的图像(C#)Baumer工业相机Baumer工业相机的彩色和黑白成像的技术背景Baumer工业相机通过BGAPI SDK在回调函数里显示图像彩色工业相机在BufferEvent显示图像黑白工业相机在BufferEven…
Baumer工业相机堡盟工业相机如何使用BGAPISDK将图像数据转换为ImageSource图像(C#)
Baumer工业相机堡盟工业相机如何使用BGAPISDK将图像数据转换为ImageSource(C#) Baumer工业相机Baumer工业相机图像数据转为ImageSource的技术背景Baumer工业相机使用BGAPISDK将图像数据转换为ImageSource方式1.引用合适的类文件2.将BGAPISDK原始图像数据…

OPT(奥普特)2D尺寸测量传感系统上市!
OPT(奥普特)新推出的2D尺寸测量传感系统,支持一键测量,无需编程,具有测量精度高、速度快及操作简单等特性,适用范围更广。
高精度成像系统,提升测量准确度
尺寸测量与控制是保证产品交付质量的…

Baumer工业相机堡盟工业相机IO介绍与配置
Baumer工业相机堡盟工业相机IO介绍与配置 Baumer工业相机Baumer工业相机IO的作用Baumer工业相机IO的作用Baumer工业相机IO上点连 Baumer工业相机
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计数和识别、运…
【视觉检测】电源线圈上的导线弯直与否视觉检测系统软硬件方案
检测内容 线圈上的导线弯直与否检测系统。 检测要求 检测线圈上的导线有无弯曲,弯曲度由客户自己设定。检测速度5K/8H625PCS/H。 视觉可行性分析 对样品进行了光学实验,并进行图像处理,原则上可以使用机器视觉进行测试测量…
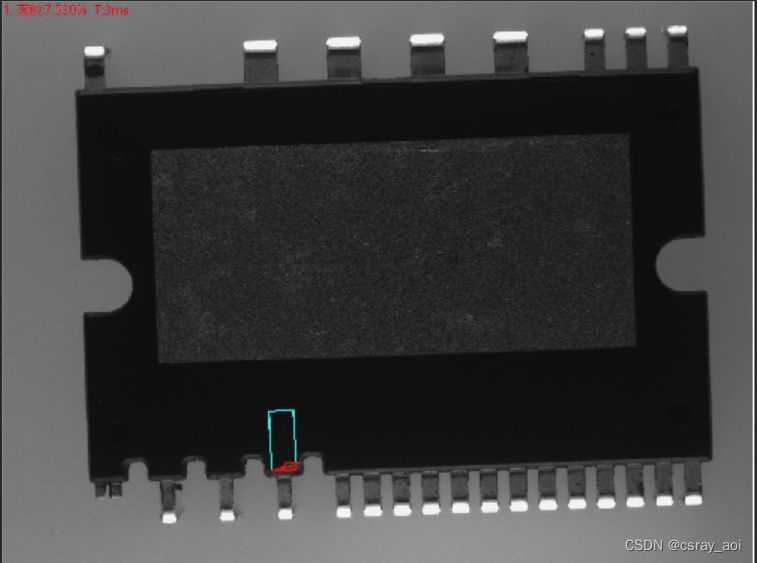
机器视觉Halcon-焊点提取排序设计思路一
目录 一.内容提要①本文是Blob示例之一,利用二值化原理阈值分割的方法,进行焊点检出的思路。二.问题分析及设计思路①.对图形窗口字体设置②.通过亮背景提取暗特征,提取焊点③.图像处理④.显示排序数字一.内容提要
①本文是Blob示例之一,利用二值化原理阈值分割的方法,进…
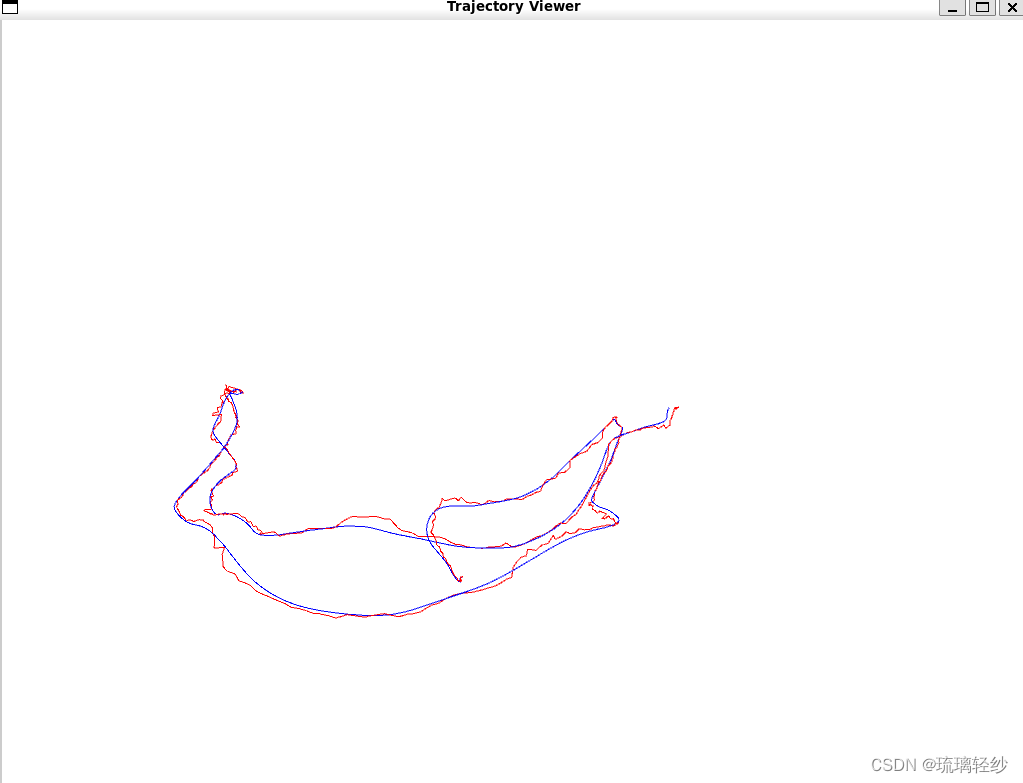
SLAM十四讲——ch4实践(李群李代数)
视觉SLAM14讲----ch4的操作及避坑 一、ch4的实践的准备工作二、各个实践操作1. Sophus的基本使用方法2. 例子:评估轨迹误差 三、遇到的问题 一、ch4的实践的准备工作
确保已经有Sophus库,Sophus库是一个较好的李代数库。
注意: 开始时slamb…
Baumer工业相机堡盟工业相机如何使用BGAPISDK对两个万兆网相机进行硬件触发同步(C++)
Baumer工业相机堡盟工业相机如何使用BGAPISDK对两个万兆网相机进行硬件触发同步(C) Baumer工业相机Baumer工业相机BGAPISDK和触发同步的技术背景Baumer工业相机使用BGAPISDK进行双相机主从相机触发1.引用合适的类文件2.使用BGAPISDK设置主相机硬件触发从…
涂胶检测方案 汽车涂胶视觉检测
在胶水涂覆过程中容易出现很多质量缺陷,如漏胶、断胶、胶水涂覆过量等。常规手段依靠人工目视和卡尺测量,存在太多不确定因素,且无法实时在线检测,且很难实现机械臂的轨迹观测,无法确定问题根源。相比人工检测…
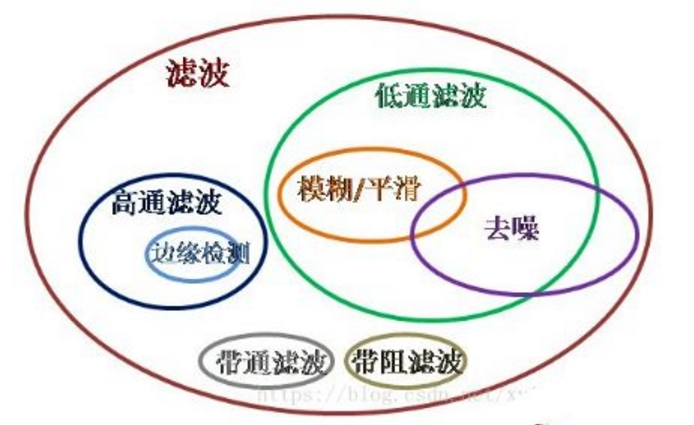
机器视觉检测中的图像预处理方法:平滑模糊处理,锐化
一、平滑模糊处理
以Dalsa sherlock软件为例,一起来了解一下视觉检测中平滑模糊的图像处理方法。 1、观察灰度分布来描述一幅图像称为空间域,观察图像变化的频率被称为频域。
2、频域分析:低频对应区域的图像强度变化缓慢,高频对应的变化快。低通滤波器去除了图像的高频部…
电影拍摄技术-景别、构图、角度、景深
电影拍摄技术 类型Shot Sizes 电影九大景别Establishing Shot 远景Master Shot 主镜头Wide Shot 广角镜头Full Shot 全景Medium Full Shot 中全景Medium Shot 中景Medium Close Up 中近景Close Up 近景近景特写的艺术 Extreme Close Up 极端近景 Framing 取景与构图Single Shot…
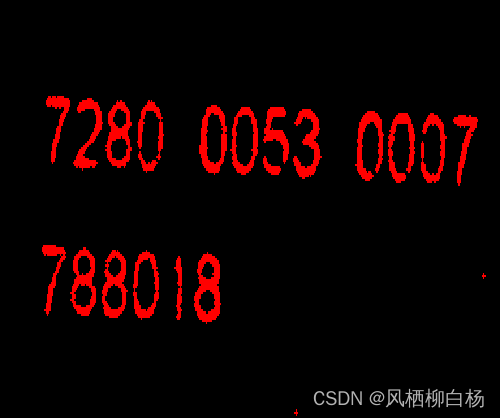
【转】Tesseract-OCR 字符识别
网上看到的这篇文章,自己试了一试: 自己手写了一个,识别的结果是: “s6 7” 不能说一模一样,那也是相当靠谱啊。
这还是没通过jTessBoxEditorFX训练的情况下。
如果不是手写,用标准的数字测试࿰…
直线导轨在视觉检测设备中的应用
随着科技的不断发展,视觉检测设备已经逐渐代替了传统的人工品检,成为了工业生产中的一部分,在五金配件、塑胶件、橡胶件、电子配件等检测工业零部件表面外观缺陷尺寸方面应用,视觉检测设备具有优势。 直线导轨作为视觉检测设备中重…
ICE-BA代码解析
从main函数开始,读取左右相机,IMU的配置文件,加载左相机和右相机的图像列表,然后进入循环处理依次处理每一帧图像并跟踪特征点,特征点跟踪使用的Brisk库,和通用的跟踪过程相似,我们主要关注特征…
计算机视觉五大核心研究任务全解:分类识别、检测分割、人体分析、三维视觉、视频分析
目录 一、引言1.1 计算机视觉的定义1.1.1 核心技术1.1.2 应用场景 1.2 历史背景及发展1.2.1 1960s-1980s: 初期阶段1.2.2 1990s-2000s: 机器学习时代1.2.3 2010s-现在: 深度学习的革命 1.3 应用领域概览1.3.1 工业自动化1.3.2 医疗图像分析1.3.3 自动驾驶1.3.4 虚拟现实与增强现…
基于YOLOv7 Pose 与 MediaPipe实现人体姿态估计-附源码
文末附相关源代码实现的下载链接 基于深度学习的人体姿势估计 自 2014 年 Google 首次发布 DeepPose 以来,基于深度学习的姿态估计算法已经取得了长足的进步。这些算法通常分两个阶段工作。 人员检测关键点定位根据先到的阶段,可以将它们分为自上而下和自下而上的方法。 自上…
计算机视觉 - 理论 - 从卷积到识别
计算机视觉 - 理论入门 前言一,导论:二,卷积:图像去噪:常值卷积:高斯卷积:椒盐去噪:锐化程度: 三,边缘检测:图像信号导数:求导算子:图…
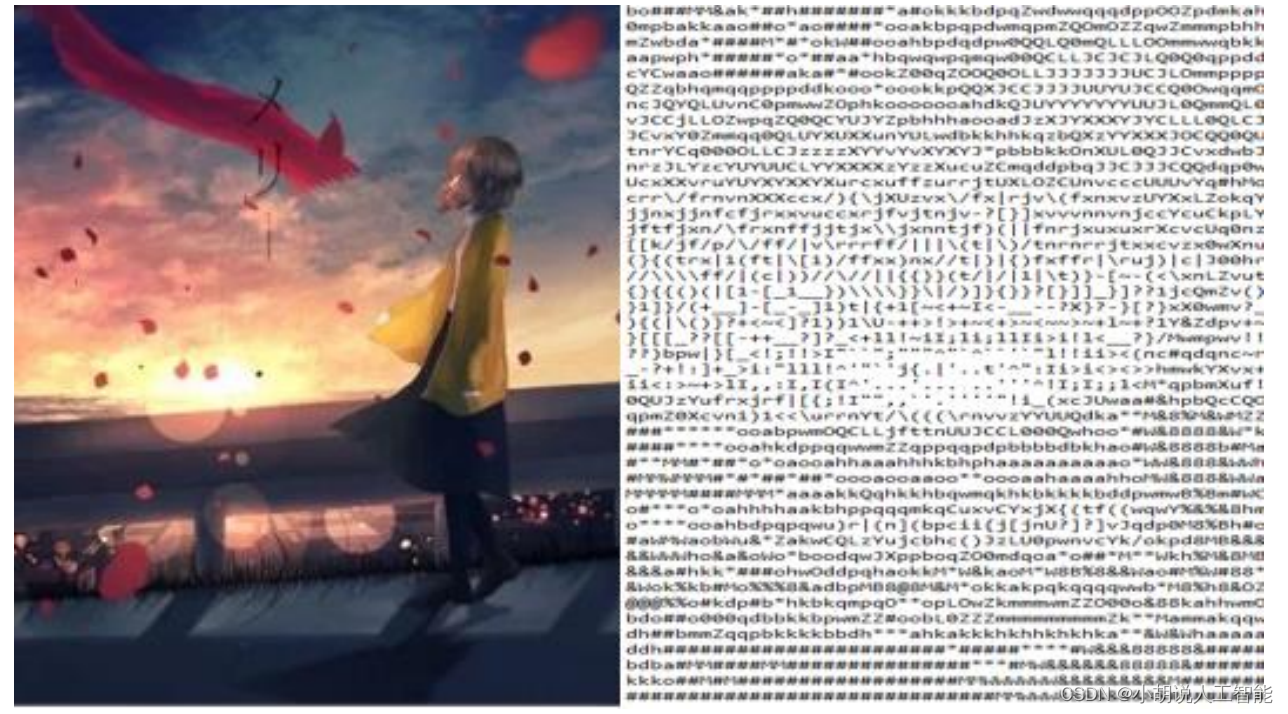
基于Python+OpenCV的视频字符化(深度学习+机器视觉)含全部工程源码
目录 前言总体设计系统整体结构图系统流程图 运行环境Python 环境OpenCV环境 模块实现1. 视频读取及处理2. 色素块识别与替换3. 视频合成4. 操作系统上的实现 系统测试工程源代码下载其它资料下载 前言
本项目利用 OpenCV 提供的轻量、高效的 C类和 Python 接口,实…
Baumer工业相机堡盟工业相机如何通过BGAPISDK复制内存空间存储图像数据序列(C#)
Baumer工业相机堡盟工业相机如何通过BGAPISDK复制内存空间存储图像数据序列(C#) Baumer工业相机Baumer工业相机BGAPISDK和复制内存空间存储图像的技术背景Baumer工业相机通过BGAPISDK复制内存空间存储图像功能1.引用合适的类文件2.通过BGAPISDK建立内存空…
机器视觉工程师,先就业再择业?还是先择业后就业?
机器视觉halcon-胶水缺陷检测 视觉人机器视觉粉丝经常问我,我学完的课程,我可以拿多少钱。
学完,不代表以后不学。一直要学。
学完,不一定就业。就业肯定还要学习。 拿多少钱,要看你们公司底薪在什么位置。所处的城市经济也有很大关系。 课程的学完,代表你对机器视觉很…
Baumer工业相机堡盟工业相机如何通过BGAPISDK设置多帧采集模式(C++)
Baumer工业相机堡盟工业相机如何通过BGAPISDK设置多帧采集模式(C) Baumer工业相机Baumer工业相机BGAPISDK和多帧采集模式的技术背景Baumer工业相机通过BGAPISDK设置多帧采集模式功能1.引用合适的类文件2.通过BGAPISDK设置多帧采集模式功能 Baumer工业相机…
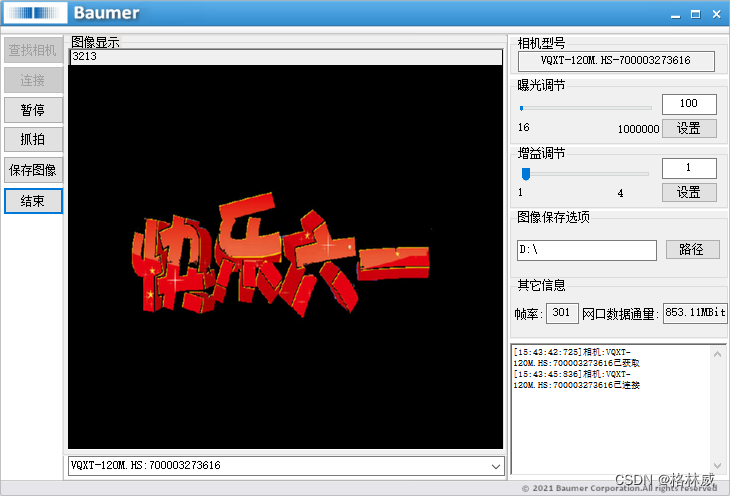
Baumer工业相机堡盟工业相机如何使用BGAPISDK联合Halcon将图像中的六一快乐字体提取出来(C#)
Baumer工业相机堡盟工业相机如何使用BGAPISDK联合Halcon将图像中的六一快乐字体提取出来(C#) Baumer工业相机Baumer工业相机使用Halcon图像算法的技术背景Baumer工业相机通过BGAPI SDK联合Halcon使用图像算法1.引用合适的类文件2.BGAPISDK在图像回调中引…
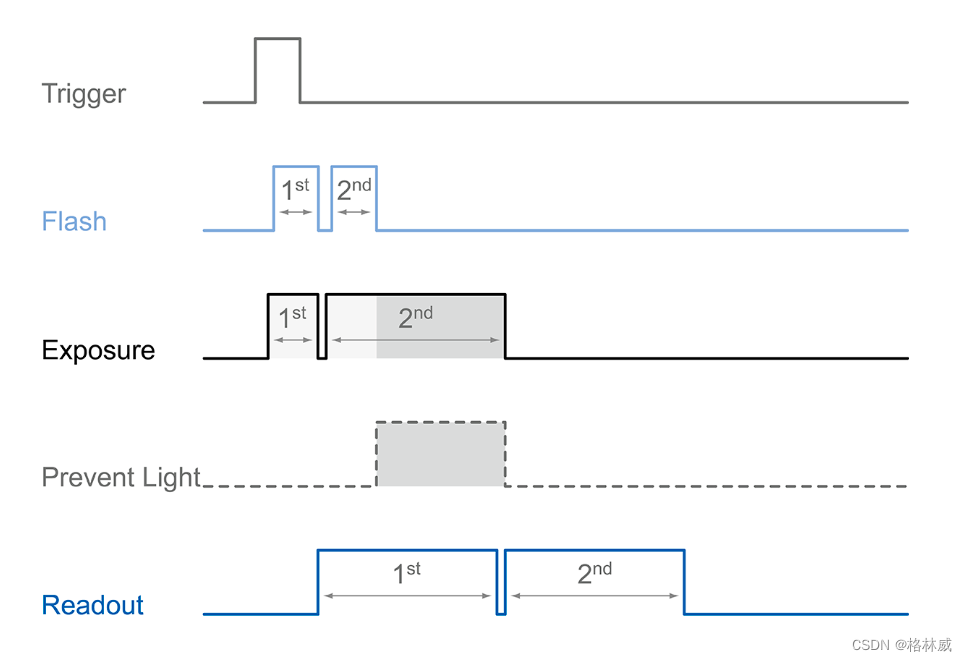
Baumer工业相机堡盟工业相机如何通过BGAPISDK进行定序器编程:VCXG双快门操作(C++)
Baumer工业相机堡盟工业相机如何通过BGAPISDK进行定序器编程:VCXG双快门操作(C) Baumer工业相机Baumer工业相机BGAPISDK和定序器编程的技术背景Baumer工业相机通过BGAPISDK进行定序器编程功能1.引用合适的类文件2.Baumer工业相机通过BGAPISDK进行定序器编…
机器视觉康耐视Visionpro-脚本编写标记标识:点,直线,矩形,圆
显示标记标识的重要作用就是,对NG或者OK对操作机器视觉的人去看到具体位置缺陷或者NG坐标。
一.点CogPointMarker
CogPointMarker PointMarker1 = new CogPointMarker();//创建对象,点CogPointMarker
//注意运行工具
PointMarker1.X = 100;
PointMarker1
【机器视觉】揭秘机器视觉在锂电池生产中的应用
随着环保意识的日益增强和新能源汽车市场的快速发展,新能源锂电池的需求量也在不断攀升。而在锂电池生产的全过程中,机器视觉技术正发挥着越来越重要的作用。那么,机器视觉到底能在哪些环节大显身手呢?本文将带您揭秘机器视觉在锂电池生产中…
Baumer工业相机堡盟工业相机如何通过BGAPI SDK直接实现Mono16位深度的图像保存(C++)
Baumer工业相机堡盟工业相机如何通过BGAPI SDK直接实现Mono16位深度的图像保存(C) Baumer工业相机Baumer工业相机保存位深度12/16位图像的技术背景代码案例分享1:引用合适的类文件2:通过BGAPI SDK直接转换保存Mono12/16图像 Baume…

机器视觉应用开发什么最重要?
(QQ群有答疑)零基础小白快速上手海康VisionMaster开发系列课程 高级语言在机器视觉就是工具,机器视觉软件,在机器视觉中也是工具,在机器视觉应用开发中,图像处理是最重要的,一切看图像ÿ…

项目一:基于YOLOv7的输电线路销钉缺失检测项目
1. YOLOv7模型介绍
YOLOv7是目标检测算法YOLO(You Only Look Once)的第七个版本,也是目前较流行的YOLO算法版本之一。
YOLOv8主要结构:
1. Backbone网络:采用CSPDarknet53作为主干网络,在不增加参数数量…
康耐德视觉检测系统可以在元器件生产中发挥什么作用?
电子元器件作为电子信息产业链的上游产品,是开发通信、计算机及网络、数字音视频等系统和终端产品的基础,电子元部件工作是否可靠决定了电子设备运行是否正常。电子元器件的外观缺陷检测是一个非常关键的部分,因为这类产品一般都比较小。质量…
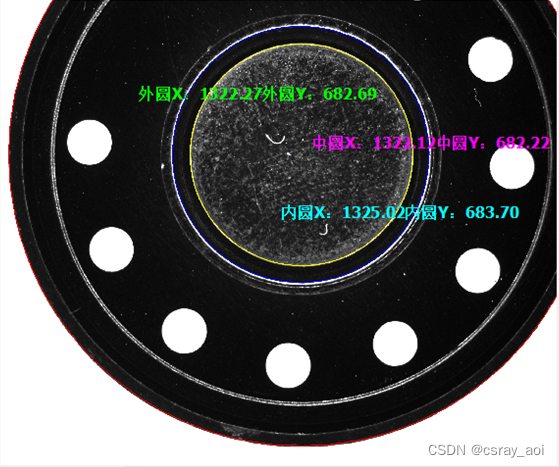
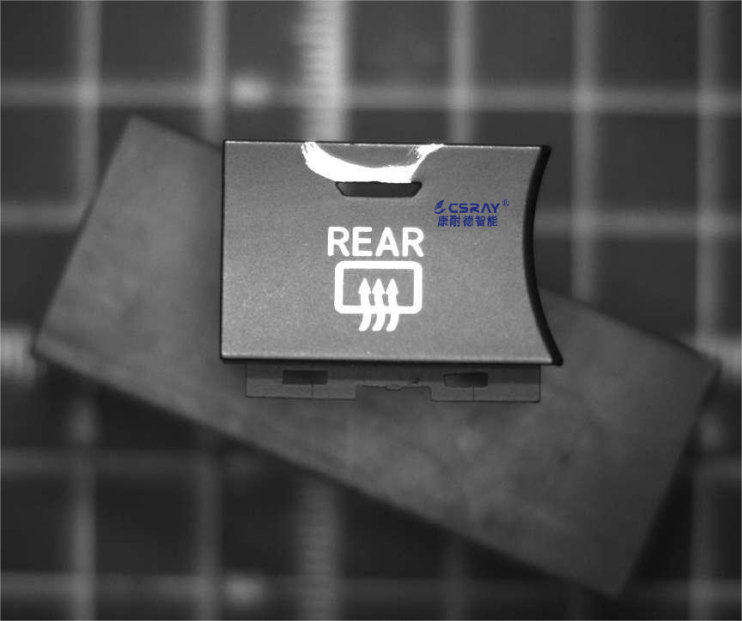
【机器视觉】喇叭的外圆以及金属内圆的同心度视觉检测--康耐德智能
客户的需求 检测内容 喇叭的外圆以及金属内圆的同心度测量
检测要求 精度0.02mm,速度没要求,抽检产品。
评估 视觉可行性分析 对贵司的样品进行了光学实验,并进行图像处理,原则上可以使用机器视觉进行测试测量。
结果 对所有样…
【视觉系统】电容正负极角度机器视觉测量软硬件方案-康耐德智能
电容正负极角度测量 客户的需求 检测内容 电容的正负极角度测量。 检测要求 判断电容的正负极,无精度要求,速度越快越好。 凯瑞斯评估 视觉可行性分析 对贵司的样品进行了光学实验,并进行图像处理,…
机器视觉之Basler工业相机使用和配置方法(C++)
basler工业相机做双目视觉用,出现很多问题记录一下:
首先是多看手册:https://zh.docs.baslerweb.com/software
手册内有所有的源码和参考示例,实际上在使用过程中,大部分都是这些源码,具体项目选择对应的…

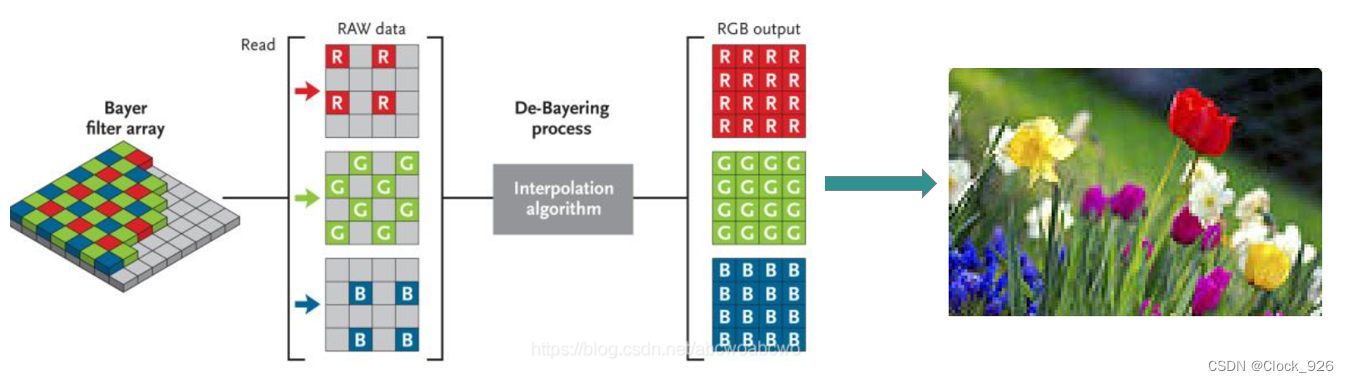
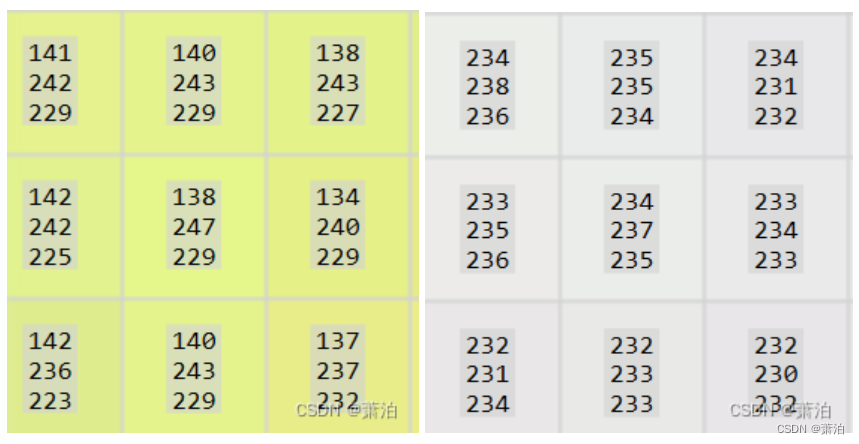
ISP图像信号处理——白平衡校正和标定介绍以及C++实现
从数码相机直接输出的未经过处理过的RAW图到平常看到的JEPG图有一系列复杂的图像信号处理过程,称作ISP(Image Signal Processing)。这个过程会经过图像处理和压缩。
参考文章1:http://t.csdn.cn/LvHH5
参考文章2:htt…

C#(Csharp)我的基础教程(四)(我的菜鸟教程笔记)-Windows项目结构分析、UI设计和综合事件应用的探究与学习
目录 windows项目是我们.NET学习一开始必备的内容。
1、窗体类(主代码文件窗体设计器后台代码文件)
主窗体对象的创建:在Program类里面: Application.Run(new FrmMain());这句代码就决定了,当前窗体是项目的主窗体。…
国产视觉检测设备崛起,以AI机器视觉及自研算法破解智造难题
机器视觉作为人工智能的前沿分支之一,被称为智能制造的“智慧之眼”,在工业领域中,能够代替人工完成识别、测量、定位、检测等工作,以实现对设备精密控制及产线智能化、自动化升级。
同时,深度学习和3D视觉的技术升级…

C#通过重写Panel改变边框颜色与宽度的方法
在C#中,Panel控件是一个容器控件,用于在窗体或用户控件中创建一个可用于容纳其他控件的面板。Panel提供了一种将相关控件组合在一起并进行布局的方式。以下是Panel控件的详细使用方法:
在窗体上放置 Panel 控件:
在 Visual Studio 的窗体设计器中,从工具箱中拖动并放置一…
海康威视、大华、宇视rtsp实时读取网络摄像头
目录 1 RTSP介绍
1.海康 1.2 大华
1.3 宇视
2.实时读取
2.1 cv2.VideoCapture打开视频流
2.2 ffmpeg打开视频流
2.3 c 1 RTSP介绍
RTSP(Real-Time Streaming Protocol)是一种用于实时流媒体传输的网络协议。它被设计用于在客户端和服务器之间传输…
Baumer工业相机堡盟工业相机如何通过BGAPI SDK设置相机的图像剪切(ROI)功能(C#)
Baumer工业相机堡盟工业相机如何通过BGAPI SDK设置相机的图像剪切(ROI)功能(C#) Baumer工业相机Baumer工业相机的图像剪切(ROI)功能的技术背景CameraExplorer如何使用图像剪切(ROI)功…
康耐德机器视觉系统在锂电池封装外观缺陷检测发挥什么作用?
随着新能源大力发展,电池的需求越来越多,锂电池生产过程中需要保证质量,通过人工检测会出现错误,而且容易把电池包二次损坏。随着机器视觉技术的发展,很多锂电池生产厂家引入机器视觉来替代人工质检,实现产…

ChatGPT 现在可以看、听和说话了!
🌷🍁 博主猫头虎 带您 Go to New World.✨🍁 🦄 博客首页——猫头虎的博客🎐 🐳《面试题大全专栏》 文章图文并茂🦕生动形象🦖简单易学!欢迎大家来踩踩~🌺 &a…
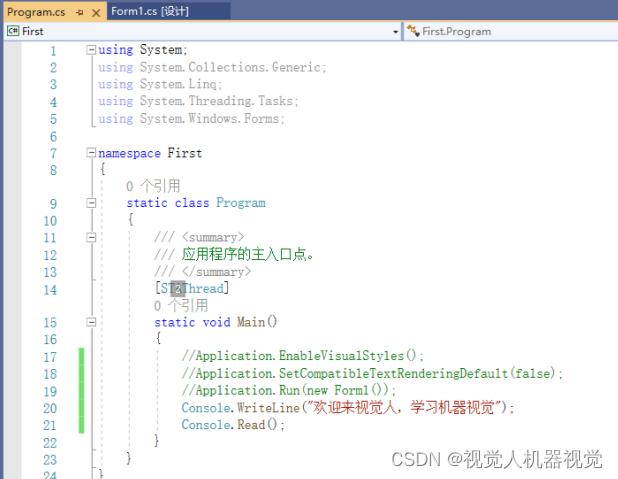
C#程序到底从哪里开始看,从Main函数开始,那么Main函数是什么?
视觉人机器视觉粉丝问我,拿到自己公司得架构,问我,C#程序到底从哪里看,从Main函数开始,那么Main函数是什么?
Main()函数 Main()是C#应用程序的入口点,执行这个函数就是执行应用程序。也就是说,在执行过程开始时,会执行Main()函数,在Main()函数执行完毕时,执行过…
Baumer工业相机堡盟工业相机如何通过BGAPI SDK设置相机的图像剪切(ROI)功能(C++)
Baumer工业相机堡盟工业相机如何通过BGAPI SDK设置相机的图像剪切(ROI)功能(C) Baumer工业相机Baumer工业相机的图像剪切(ROI)功能的技术背景CameraExplorer如何使用图像剪切(ROI)功…
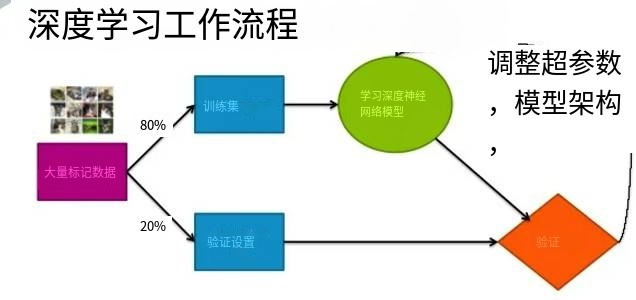
《深度学习与图像分析——基础与应用》书籍阅读
李松斌,刘鹏著,科学出版社 2023年5月20日16:32:38开始阅读,2023年7月12日读完。 1.基础知识
获得泛化能力是深度学习的最终目标。泛化能力是指处理未被观察个的数据的能力(即不包含在训练数据中的数据)。 训练集&…

2023工博会,正运动机器视觉运动控制一体机应用预览(二)
展会倒计时:7天
本次的中国国际工业博览会正运动技术将携高性能x86平台Windows实时视觉运动控制器VPLC711亮相。 •运动控制机器视觉一站式开发,缩短开发周期,降低硬件成本;
•可替代传统的工控机运动控制卡/PLC视觉软件的自动化…
Baumer工业相机堡盟工业相机如何通过BGAPISDK设置相机的固定帧率(C#)
Baumer工业相机堡盟工业相机如何通过BGAPI SDK设置相机的固定帧率(C#) Baumer工业相机Baumer工业相机的固定帧率功能的技术背景CameraExplorer如何查看相机固定帧率功能在BGAPI SDK里通过函数设置相机固定帧率 Baumer工业相机通过BGAPI SDK设置相机固定帧…
Baumer工业相机堡盟工业相机如何通过BGAPI SDK设置相机的固定帧率(C++)
Baumer工业相机堡盟工业相机如何通过BGAPI SDK设置相机的固定帧率(C) Baumer工业相机Baumer工业相机的固定帧率功能的技术背景CameraExplorer如何查看相机固定帧率功能在BGAPI SDK里通过函数设置相机固定帧率 Baumer工业相机通过BGAPI SDK设置相机固定帧…
ubuntu下yolox tensorrt模型部署
TensorRT系列教程之 Windows10下yolov8 tensorrt模型加速部署TensorRT系列教程之 Linux下 yolov8 tensorrt模型加速部署TensorRT系列教程之 Linux下 yolov7 tensorrt模型加速部署TensorRT系列教程之 Linux下 yolov6 tensorrt模型加速部署TensorRT系列教程之 Linux下 yolov5 ten…

工业AI视觉检测优势显著,深眸科技为工业自动化发展注入更强动力
随着工业自动化的不断发展,工业机器视觉检测技术日趋成熟,能够对制造生产线上的产品进行识别、定位、检测、测量等功能,使得工业生产更加高效和精准。
同时机器视觉检测也是一种基于图像处理和模式识别的技术,能够通过高清晰度工…
双目视觉实战--相机几何
目录 一、针孔摄像机和透镜
1. 针孔摄像机的原理
2. 近轴折射模型
3. 镜头畸变问题
二、摄像机几何
1. 数学基础
2. 相机坐标系(空间点)→像素坐标系的映射关系:
3. 规范化投影变换
4. 投影变换的性质
三、其他摄像机模型
1. 弱透视…
Baumer工业相机堡盟工业相机如何使用BGAPISDK和OpenCV设置图像进行比例显示(C++)
Baumer工业相机堡盟工业相机如何使用BGAPISDK和OpenCV设置图像进行比例显示(C) Baumer工业相机Baumer工业相机BGAPISDK和OpenCV的技术背景Baumer工业相机通过BGAPISDK和OpenCV设置图像进行比例显示功能1.引用合适的类文件2.通过BGAPISDK和OpenCV设置图像…
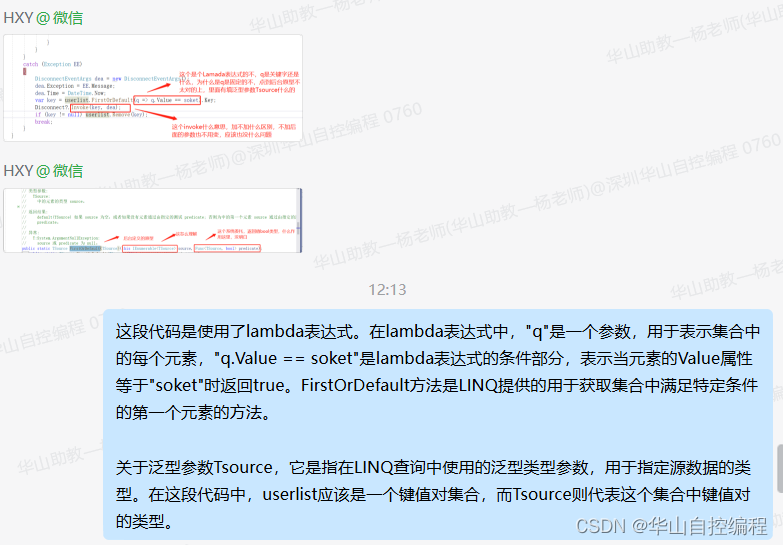
C# 与lambda表达式
大家好,我是华山自控编程朱老师
前几天一个学员在学习C#与lambda表达式交互时,也不知道lambda表达式可以用来做什么 。下面我们就详细讲讲C# 和lambda表达式交互的相关知识。
C#和Lambda表达式的用法 C#是一种面向对象的编程语言,广泛应用于Windows平台…
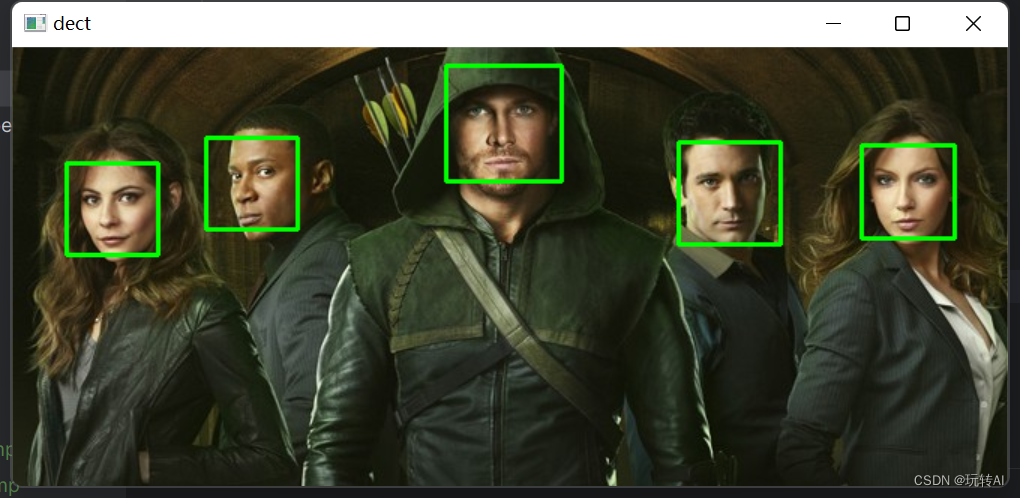
opencv 进阶10-人脸识别原理说明及示例-cv2.CascadeClassifier.detectMultiScale()
人脸识别是指程序对输入的人脸图像进行判断,并识别出其对应的人的过程。人脸识别程 序像我们人类一样,“看到”一张人脸后就能够分辨出这个人是家人、朋友还是明星。 当然,要实现人脸识别,首先要判断当前图像内是否出现了人脸&…

PCIE超高速实时运动控制卡在六面外观视觉检测上的应用
市场应用背景
XPCIE1028超高速实时运动控制卡在六面外观检测高速视觉筛选中的应用,结合正运动技术提供的专用筛选机调试软件,可实现15000pcs/分钟的IO触发检测速度,只需简单参数设置,搭配图像采集硬件和视觉处理软件,…
视觉SLAM:一直在入门,如何能精通,CV领域的绝境长城,
目录
前言
福利:文末有chat-gpt纯分享,无魔法,无限制
1 什么是SLAM?
2 为什么用SLAM?
3 视觉SLAM怎么实现?
4 前端视觉里程计
5 后端优化
6 回环检测
7 地图构建
8 结语 前言
上周的组会上&…

从零开始学习YOLOv5 保姆级教程
一、前言
YOLO系列是one-stage且是基于深度学习的回归方法,而R-CNN、Fast-RCNN、Faster-RCNN等是two-stage且是基于深度学习的分类方法。
YOLOv5是一种单阶段目标检测算法,该算法在YOLOv4的基础上添加了一些新的改进思路,使其速度与精度都得…
拟合圆算法源码(商业)
1、输入一些点
2、执行fitCircle算法
3、输出圆心(x,y)及半径r
Box fitCircle(const std::vector<cv::Point2f>& points)
{Box box;box.x 0.0f;box.y 0.0f;box.r 0.0f;if (points.size() < 3){return box;}int i 0;double X1 0;double Y1 0;double X2 …

机器视觉工程师永不为奴,他们是肯干肯出差肯加班肯拼命肯被使唤肯被叼
永不为奴,为什么这样呐喊,真的很难做到。我们职业机器视觉工程师,本身职业具有一大特点就是专业性。 但是我们机器视觉工程师是专业技术绝不苟同于不是技术人员言语,我们很专业。 肯出差:
设备去那里,…

【内推码:NTAMW6c】 MAXIEYE智驾科技2024校招启动啦
MAXIEYE智驾科技2024校招启动啦【内推码:NTAMW6c】
【招聘岗位超多!!公司食堂好吃!!】
算法类:感知算法工程师、SLAM算法工程师、规划控制算法工程师、目标及控制算法工程师、后处理算法工程师
软件类&a…

AI:05 - 基于深度学习的道路交通信号灯的检测与识别
随着人工智能的快速发展,基于深度学习的视觉算法在道路交通领域中起到了重要作用。本文将探讨如何利用深度学习技术实现道路交通信号灯的检测与识别,通过多处代码实例展示技术深度。
道路交通信号灯是指示交通参与者行驶和停止的重要信号。准确地检测和识别交通信号灯对于智…
opencv案例06-基于opencv图像匹配的消防通道障碍物检测与深度yolo检测的对比
基于图像匹配的消防通道障碍物检测
技术背景
消防通道是指在各种险情发生时,用于消防人员实施营救和被困人员疏散的通道。消防法规定任何单位和个人不得占用、堵塞、封闭消防通道。事实上,由于消防通道通常缺乏管理,导致各种垃圾࿰…
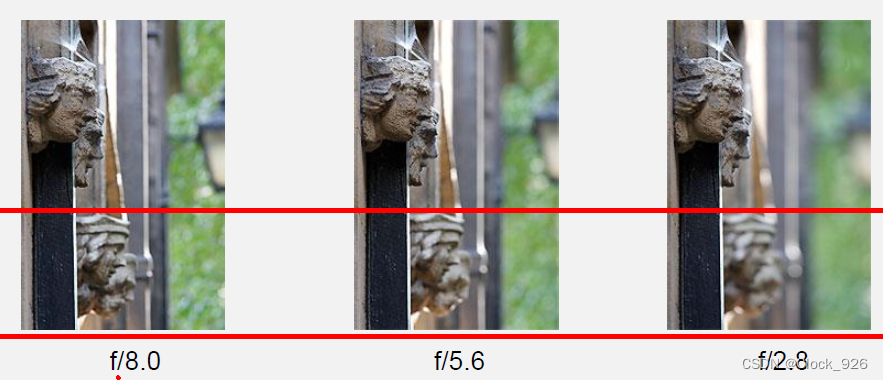
为什么智能相机需要搭配镜头使用?
镜头作用是将光学图像聚焦在图像传感器的光敏面阵上。不同类型的工业镜头,成像质量也各不相同,成像质量也有差异,影响工业镜头的因素有哪些呢 图像中心与边缘的影响图像中心较边缘分辨率高;图像中心较边缘光场照度高;像…

基于Jetson Nano的并行图像滤波算法优化与部署
基于 Jetson Nano 的并行图像滤波算法优化 我们实现了基于 GPU (CUDA) 和 CPU (PThread) 的卷积算法,在此基础之上,我们进一步实现 Sobel、Laplacian、均值和高斯滤波器,它们可以被用于图像处理,一个典型的应用场景就是图像降噪。…
(零)如何做机器视觉项目
文章目录 1 项目的前期准备1.1 从5个方面初步分析客户需求1.2 方案评估与验证1.3 签订合同 2 项目规划2.1 定义客户端的详细需求2.2 制定项目管理计划2.3 方案评审 3 详细设计3.1 硬件设备的选择与环境搭建3.2 软件开发平台与开发工具的选择3.3 机器视觉系统的整体框架与开发流…

【全新开源项目】专为智能无人系统打造的边缘实时感知 SDK 库 SpireCV 正式上架
移动机器人的视觉感知系统,以往常用的是诸如OpenCV和一些深度学习的视觉库。然而这类大而全的视觉库,很少针对移动机器人进行优化(尤其是针对无人机),也不会针对硬件进行相关的优化。 机器人尤其是无人机直接使用深度学习库会面临什么问题&am…
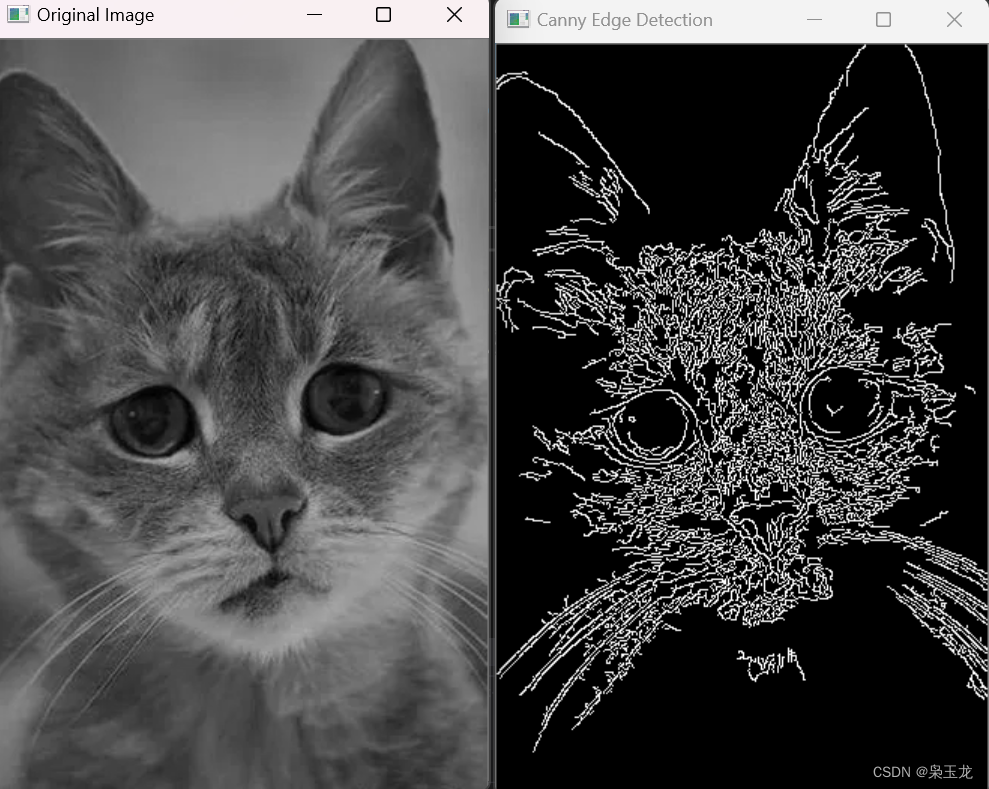
c++视觉检测-----Canny边缘算子
Canny边缘算子
cv::Canny()是OpenCV库中用于执行Canny边缘检测的函数。Canny边缘检测是一种广泛使用的图像处理技术,用于检测图像中的边缘。
以下是cv::Canny()函数的一般用法和参数:
void cv::Canny(cv::InputArray image, // 输入图像&#x…

共谋工业3D视觉发展,深眸科技以自研解决方案拓宽场景应用边界
随着中国工业领域自动化程度逐渐攀升,“机器换人”这一需求进一步提升。在传统2D工业视觉易受环境光干扰、无法进一步获取物体深度信息的限制条件下,工业3D视觉凭借着更强的空间和深度感知能力,以及通过点云数据获取物体距离和三维坐标信息的…
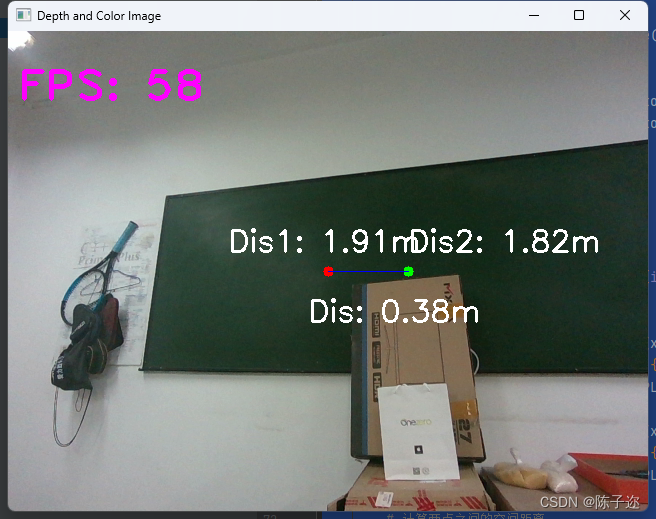
基于intel D4系列深度相机 (D455)的单点测距和两点距离测量(代码讲解超详细)
目录
1.简介 1.1 intel D4系列深度相机 (D455)
1.2结构光(Structured-light)
2.基于深度相机的单点测距和两点距离测量
2.1函数详解
2.2 全部代码 1.简介 1.1 intel D4系列深度相机 (D455)
Intel RealSense D435、D455等D4系列:
Intel D4系列深度相机是由英特…
Baumer工业相机堡盟工业相机如何通过BGAPISDK进行定序器编程:VCXG双快门操作(C#)
Baumer工业相机堡盟工业相机如何通过BGAPISDK进行定序器编程:VCXG双快门操作(C#) Baumer工业相机Baumer工业相机BGAPISDK和定序器编程的技术背景Baumer工业相机通过BGAPISDK进行定序器编程功能1.引用合适的类文件2.Baumer工业相机通过BGAPISDK进行定序器…
机器视觉工程师们,再择业-换水还是换游泳池
机器视觉康耐视智能相机Insight-边缘胶路缺陷检测 再择业-换水还是换游泳池。 择业,大多数人是从高中开始选择专业,大学毕业就开始纠结选择自己的专业,再次慎重起来的时候,大多数人选择自己所学的专业,也就是我们所说,毕业就找到了一个“门当户对”的工作,无论是否本…
字符检测专题第一期:OCR技术工业应用浅谈
难题不会做?扫一扫,题目、解析立马出现。寄快递需要输入信息?扫一扫,软件自动提取上传。身份证信息需要录入?扫一扫,立马精准识别。这些都是我们日常司空见惯的动作,而实现这一切正是得益于OCR技…
深眸科技基于AI机器视觉实现应用部署,构建铝箔异物检测解决方案
异物的定义指的是影响到产品的外观质量或使用性能的外来或产品内部的物质,其产生的原因有很多种,包括在产品生产使用过程中的污染、腐蚀、氧化,以及由于生产工业控制不规范或人为疏忽等。而异物的产生,是导致产品的不良率增加的根…
五金轴尺寸机器视觉测量软硬件方案--康耐德智能
检测内容:
五金轴尺寸机器视觉测量 检测要求:
精度0.015mm,速度180~240个/分钟 视觉可行性分析:
对样品进行了光学实验,并进行图像处理,原则上可以使用机器视觉系统进行测试测量。 结果:
对…
计算摄像技术02 - 颜色空间
一些计算摄像技术知识内容的整理:颜色视觉与感知特性、颜色空间和基于彩色滤镜阵列的彩色感知。 文章目录 一、颜色视觉与感知特性 (1)色调 (2)饱和度 (3)明度 二、颜色空间 (1&…

机器视觉工程师,实际上调机仔需要居多,不需要那么多会机器视觉开发的,实际上机器视觉公司根本养不起
不要机器视觉开发等着倒闭,要那么多机器视觉开发是想倒闭,根本养不起。 人力对于机器视觉企业来说,仅仅是成本,也可以是剥削利润。当机器视觉公司开发一款标准软件后,意味着什么?技术可以复制,粘…
<sa8650>sa8650开发板-之-刷机教程(flashing)
<sa8650>sa8650开发板-之-刷机教程 flashing 一、简介1、 目的1.2、 协议一、安装 PCATApp Installing PCATapp1、安装管理工具 Install Management Tools2、选择安装PCATApp Choose to install PCATapp二、MD flash1、打开PCATApp软件准备刷机。2、拨动开发板拨码开关S5-swi…

机器视觉方案工程师,价值远不止于此
机器视觉方案工程师,很少出差,受到很多机器视觉工程师的追捧,那我们看下主要的工作职责和任职要求: 岗位职责: 1、负责机器视觉检测系统光学方案选型,主要为光源,相机镜头的选型评估; 2、负责机器视觉光学系统的设计、搭建、测试,具体是指:机器视觉中光学成像方案设…
ISP图像信号处理——平场校正介绍以及C++实现
参考文章1:http://t.csdn.cn/h8TBy
参考文章2:http://t.csdn.cn/6nmsT
参考网址3:opencv平场定标 - CSDN文库
平场校正一般先用FPN(Fixed Pattern Noise)固定图像噪声校正,即暗场校正;再用PRNU(Photo Response Non Uniformity)…
AI+视觉,共话新能源企业数字化转型新可能
近日,“新能源芯机遇2023新能源行业数字化赋能高峰论坛”在江苏常州隆重召开。本次论坛由常州市人民政府、中国能源研究会指导,武进区人民政府、常州市工业和信息化局、英特尔(中国)有限公司、阿里云计算有限公司共同举办&…
复现YOLO v1 PyTorch
复现YOLO v1 PyTorch
Paper: [1506.02640] You Only Look Once: Unified, Real-Time Object Detection (arxiv.org)
Github: EclipseR33/yolo_v1_pytorch (github.com)
数据集
VOC2007:The PASCAL Visual Object Classes Challenge 2007 (VOC2007)
VOC2012&…
Baumer工业相机堡盟工业相机如何通过BGAPI SDK获取一种偏振格式(AOP、DOLP或ADOLP)的图像(C++)
Baumer工业相机堡盟工业相机如何通过BGAPI SDK一种偏振格式(AOP、DOLP或ADOLP)的图像(C) Baumer工业相机Baumer工业相机的偏振相机的技术背景Baumer工业相机通过BGAPI SDK在获取一种偏振格式(AOP、DOLP或ADOLP…
深眸科技革新升级OCR技术,与AI视觉实现有效融合赋能各行业应用
OCR即光学字符识别,是通过扫描仪或工业相机等电子设备检查打印的字符,并通过检测暗、亮的模式确定其形状,然后用字符识别方法将形状翻译成计算机文字的过程。
目前,随着机器视觉和人工智能技术的进一步升级,OCR技术实…
基于3D点云的语义分割模型调研(最新更新2023.10.30)
文章目录 3D点云分割数据集点云模型的评价指标3D点云语义分割方法发展PointSIFT模型的效果 https://blog.csdn.net/toCVer/article/details/126265782 基于深度学习的三维点云分割综述 3D点云分割数据集
传统的点云分割方法包括基于边缘检测的方法、基于区域增长的算法、基于特…
目标检测—YOLO系列(二 ) 解读论文与复现代码YOLOv1 PyTorch
精读论文
前言
从这篇开始,我们将进入YOLO的学习。YOLO是目前比较流行的目标检测算法,速度快且结构简单,其他的目标检测算法如RCNN系列,以后有时间的话再介绍。
本文主要介绍的是YOLOV1,这是由以Joseph Redmon为首的…
海康Visionmaster-环境配置:VB.Net 二次开发环境配 置方法
Visual Basic 进行 VM 二次开发的环境配置分为三步。 第一步,使用 VS 新建一个框架为.NET Framework 4.6.1,平台去勾选首选 32 为的工程,重新生成解决方案,保证工程 Debug 下存在 exe 文件,最后关闭新建工程࿱…
llava1.5模型安装、预测、训练详细教程
引言
本博客介绍LLava1.5多模态大模型的安装教程、训练教程、预测教程,也会涉及到hugging face使用与wandb使用。
源码链接:点击这里
demo链接:点击这里
论文链接:点击这里
一、系统环境
ubuntu 20.04 gpu: 2*3090 cuda:11.6
二、LLava环境安装
1、代码下载…
第二十六章 BEV感知系列三(车道线感知)
前言 近期参与到了手写AI的车道线检测的学习中去,以此系列笔记记录学习与思考的全过程。车道线检测系列会持续更新,力求完整精炼,引人启示。所需前期知识,可以结合手写AI进行系统的学习。 BEV感知系列是对论文Delving into the De…
第二十五章 BEV感知系列二(车道线感知)
前言 近期参与到了手写AI的车道线检测的学习中去,以此系列笔记记录学习与思考的全过程。车道线检测系列会持续更新,力求完整精炼,引人启示。所需前期知识,可以结合手写AI进行系统的学习。 BEV感知系列是对论文Delving into the De…

海康Visionmaster通讯管理:通讯管理的心跳管理功能 的使用方法
当外部设备与视觉保持连接过程中,由于各种不可控的原因(例如网线被意外拔 出,网口松动,视觉程序意外退出),如何让外部设备的程序可以知道:与视觉的通讯已 经中断。 可以通过通讯管理模块中的心跳…
康耐视深度学习ViDi-Plugins菜单介绍
Manage Plugins ----------- 插件管理 能够在此窗口界面看到一些关于插件的信息,也能够在此窗口界面添加或移除(*.dll)文件。 注意:
在没有专业人员指导的情况下禁止操作添加和移除(*.dll)文件,错误的操作有可能会造成软件的功能丧失更严重…
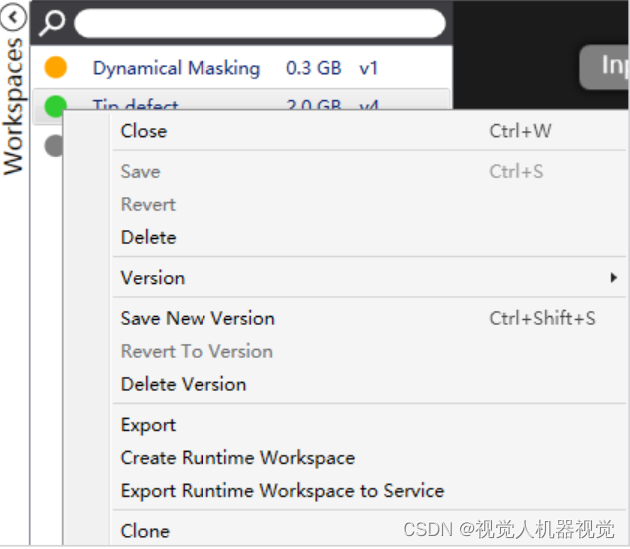
康耐视深度学习ViDi-Workspace菜单介绍与Workspace侧拉菜单
Workspace菜单介绍 New ------- 新建一个程序,点击后会呼出如下窗口,输入需要建立的程序的名字。然后点击OK按钮,就会建立一个新的程序。 Save --------- 保存当前的程序 Close -------- 关闭当前的程序 Delete ------ 删除当前的程序 Save …
海康Visionmaster-环境配置:MFC 二次开发环境配置方法
1 新建 MFC 工程,拷贝 DLL:VM\VisionMaster4.0.0\Development\V4.0.0 \ComControl\bin\x64 下的所有拷贝到项目工程输出目录下,如下图所示,项目的输出路径是 Dll 文件夹。 2 通过配置 C目录和链接器的方式配置 VM 环境 2.1 C目录下添加附加…
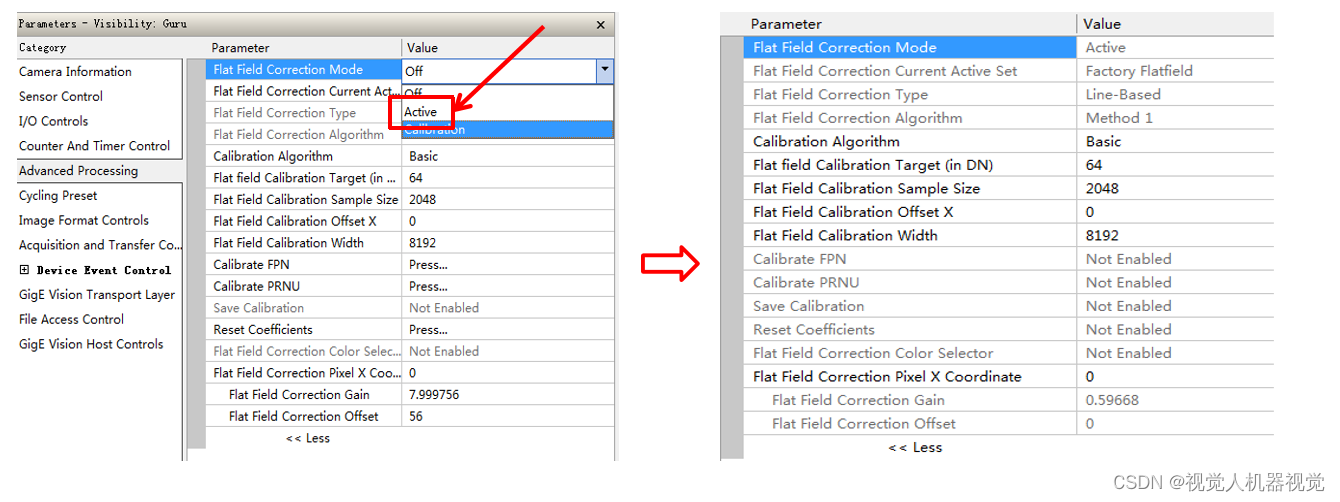
线扫相机MindVision迈德威视-相机平场矫正详细步骤
现场要求 (1)采集卡连续采集相机图像,并正常显示。 (2) 光源控制在正常工作亮度,使画面亮度不要过低也不要饱和。 (3) 调整相机使画面偏离成像位置,形成虚焦。 (4) 相机拍摄物面使用白纸,调节曝光时间使整个物面亮度均匀ÿ…
目标检测—YOLO系列(二 ) 全面解读论文与复现代码YOLOv1 PyTorch
精读论文
前言
从这篇开始,我们将进入YOLO的学习。YOLO是目前比较流行的目标检测算法,速度快且结构简单,其他的目标检测算法如RCNN系列,以后有时间的话再介绍。
本文主要介绍的是YOLOV1,这是由以Joseph Redmon为首的…
边缘检测——PidiNet网络训练自己数据集并优化推理测试(详细图文教程)
PiDiNet 是一种用于边缘检测的算法,它提出了一种简单、轻量级但有效的架构。PiDiNet 采用了新
颖的像素差卷积,将传统的边缘检测算子集成到现代 CNN 中流行的卷积运算中,以增强任务性能。
在 BSDS500、NYUD 和 Multicue 上进行了大量的实验…
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK设置相机的图像剪切(ROI)功能(C++)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK设置相机的图像剪切(ROI)功能(C) Baumer工业相机Baumer工业相机的图像剪切(ROI)功能的技术背景CameraExplorer如何使用图像剪切(ROI)功…
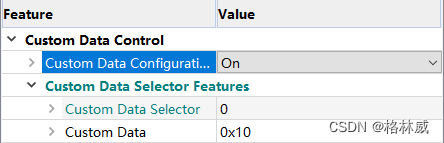
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK设置相机本身的数据保存(CustomData)功能(C++)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK设置相机本身的数据保存(CustomData)功能(C) Baumer工业相机Baumer工业相机的数据保存(CustomData)功能的技术背景CameraExplorer如何使用图像剪切࿰…
<sa8650>sa8650 XBL-之-XBL配置指南
<sa8650>sa8650 XBL-之-XBL配置指南 1 XBL Config概述1.1XBL配置使用2 XBL配置图像生成3 XBLConfig库3.1 存储闪存库3.1.1 image布局3.1.2 元数据头详细信息3.2 RAM库3.2.1 身份验证3.2.2 API支持3.3 各种设备中的存储库4 添加 XBL Config项4.1 向构建环境中的XBLConfig
线扫相机-TEK(埃科)相机平场矫正详细步骤
采集卡模式: 现场要求 (1) 采集卡连续采集相机图像,并正常显示。 (2) 光源控制在正常工作亮度,使画面亮度不要过低也不要饱和。 (3) 调整相机使画面偏离成像位置,形成虚焦。 (4) 相机拍摄物面使用白纸,调节曝光时间使整…
第二十三章 LaneAF框架结构以及接入MMDetection3D模型(车道线感知)
一 前言 近期参与到了手写AI的车道线检测的学习中去,以此系列笔记记录学习与思考的全过程。车道线检测系列会持续更新,力求完整精炼,引人启示。所需前期知识,可以结合手写AI进行系统的学习。 二 LaneAF接入openlane数据集 2.1 Lan…
海康Visionmaster-全局脚本:通过全局脚本获取通讯输 入的参数并赋值给全局变量
全局脚本根据外部通讯输入的数值赋值给全局变量,实现输入与全局变量之间的数值绑定。(一般应用于定位、标定等需要外界物理值的场景)。 第一步,在 vm 通讯管理中设置好通讯设备,连接 第二步,根据通讯设备、接收的信息…
<sa8650> sa8650介绍
一、sa8650 描述
设备说明 QAM8650P/QAMSRV1H是高通公司的下一代Snapdragon高级驾驶员辅助系统(ADAS)模块,旨在实现卓越的性能和电源效率。 它已被开发为SEooC(上下文之外的安全元素),针对假定的ASIL B用例*。QAM8650P/QAMSRV1H模块的关键组件包括SA8650P/SRV1H SoC、PM…
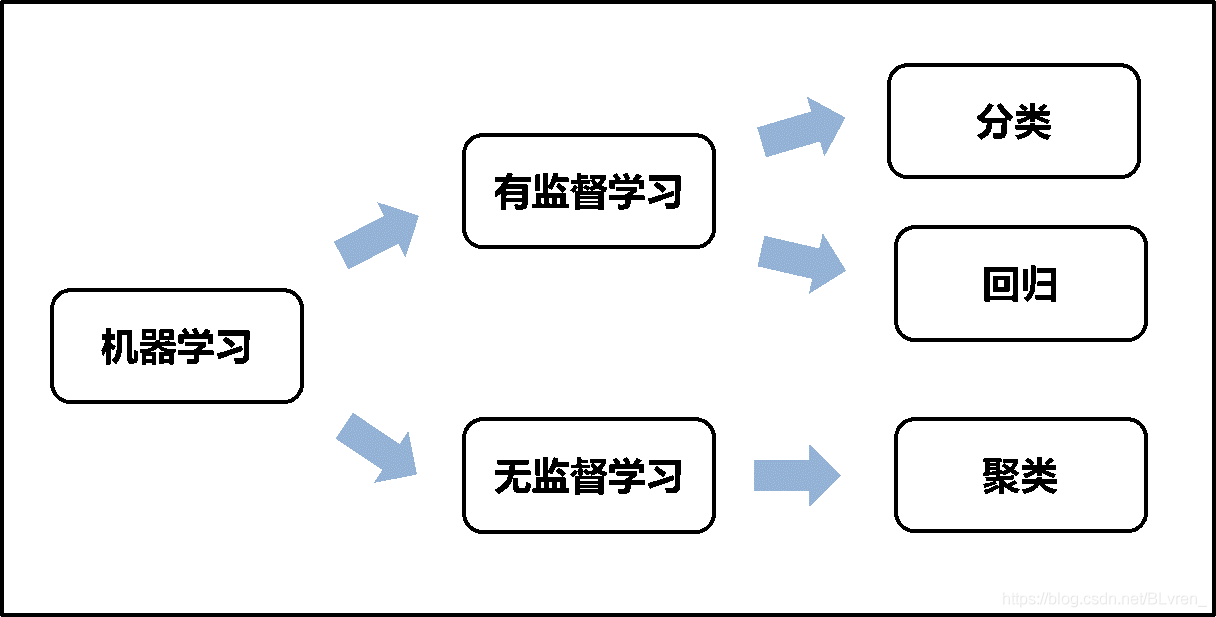
第三章:人工智能深度学习教程-人工智能与机器学习与深度学习之间的区别
人工智能基本上是通过一组规则(算法)将人类智能融入机器的机制。人工智能是两个词的组合:“人工”是指由人类或非自然物体制造的东西,“智能”是指相应地理解或思考的能力。另一个定义可能是“人工智能基本上是训练机器࿰…

第二十九章 目标检测中的测试模型评价指标(车道线感知)
前言 近期参与到了手写AI的车道线检测的学习中去,以此系列笔记记录学习与思考的全过程。车道线检测系列会持续更新,力求完整精炼,引人启示。所需前期知识,可以结合手写AI进行系统的学习。 介绍
自动驾驶的一大前提是保证人的安全…

康耐视深度学习ViDi-ViDi四大工具之一蓝色定位工具/Locate
目录 工具介绍使用步骤说明调整工具ROI添加特征标签生成定位姿态训练并审核模型编辑器参数说明蓝色定位工具/Locate工具
工具介绍 蓝色定位工具用于识别和定位图像中的特定特征或特征组。该工具的输出可用于为其他ViDi 工具提供位置数据。使用该工具时,您提供图像训练集,然后…
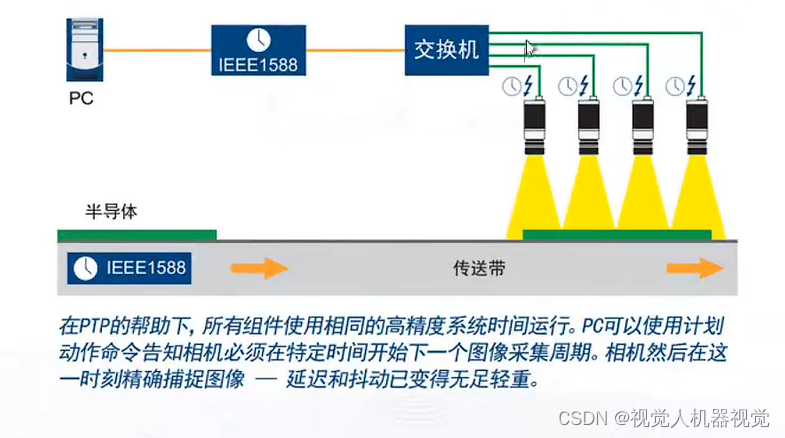
海康多个相机如何提高同时取像
PTP全称为Precision Time Synchronization Protocol,.即精确时间同步协议,它实现的是IEEE标准1588中定义的 PTP版本。用于对标准以太网或其他采用多播技术的分布式总线系统中的传感器、执行器以及其他终端设备中的时钟进行亚微秒级同步。EEE1588可以以纯软件的方式实…
<sa8650>qcxserver 之 QCarCam 6.X API介绍 (第三部分)
@[TOC](<sa8650>qcxserver 之 QCarCam 6.X API介绍(第三部分))
3 QCarCam API功能文档
QCarCam API在QCarCam.h文件中定义。
3.1 初始化QCarCam库
3.1.1 QCarCamInitialize()
初始化QCarCam接口。这必须是初始化QCarCam库的第一个调用。
原型 QCarCamRet_e QCarCamInit…
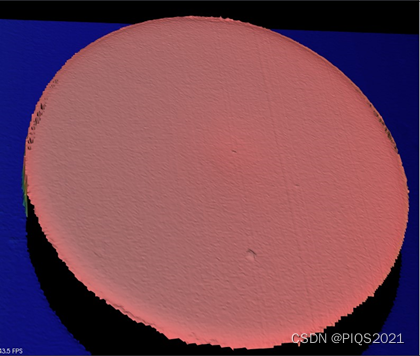
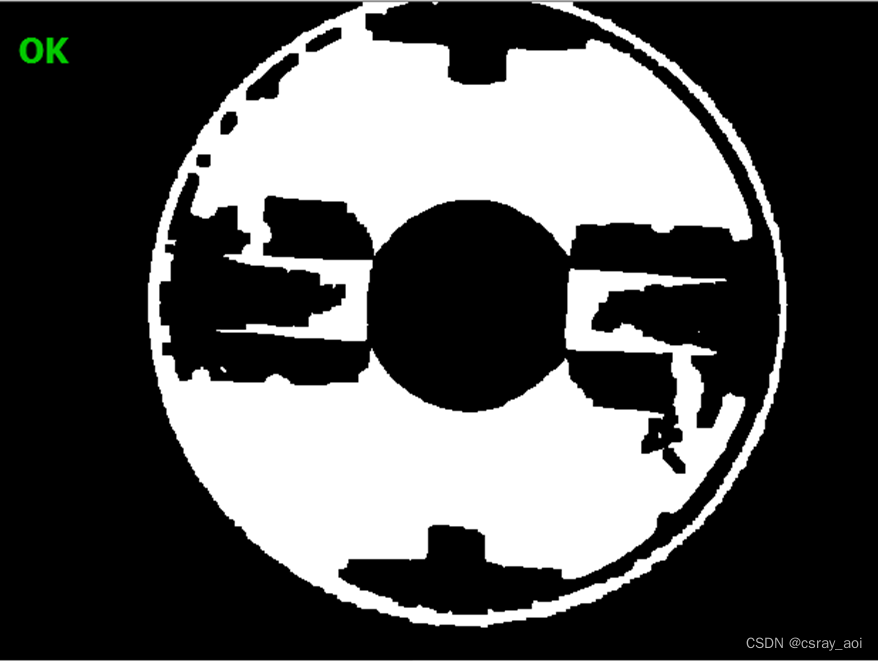
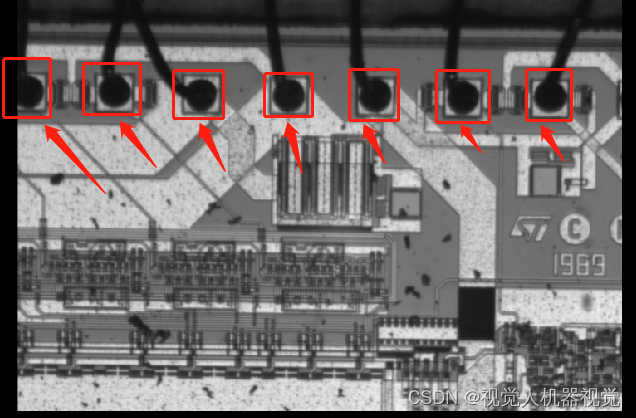
【issue-halcon例程学习】ball.hdev
例程功能 检测球形焊盘的直径。
代码如下
* ball.hdev: Inspection of Ball Bonding
*
dev_update_window (off)
dev_close_window ()
dev_open_window (0, 0, 728, 512, black, WindowID)
read_image (Bond, die/die_03)
dev_display (Bond)
set_display_font (WindowID, 1…


机器视觉选型-什么时候用远心镜头
物体厚 当被检测物体厚度较大,需要检测不止一个平面时,典型应用如食品盒,饮料瓶等。 物体位置变化 当被测物体的摆放位置不确定,可能跟镜头成一定角度时。 物体上下跳动 当被测物体在被检测过程中上下跳动,如生产线上下…

机器视觉工程师注意,没有经历过公司倒闭看下文章,机器视觉公司即将要倒闭的征兆是什么?
很多机器视觉工程师没有经历过公司倒闭,谁也不想自己的公司倒闭,毕竟我们是打工人,拿固定工资的。
机器视觉公司即将要倒闭的征兆有哪些迹象?
1、PM,机器视觉工程师频繁开会,甚至周末强制开会。
2.停…
目标检测—YOLO系列(二 ) 全面解读复现YOLOv1 PyTorch
精读论文
前言
从这篇开始,我们将进入YOLO的学习。YOLO是目前比较流行的目标检测算法,速度快且结构简单,其他的目标检测算法如RCNN系列,以后有时间的话再介绍。
本文主要介绍的是YOLOV1,这是由以Joseph Redmon为首的…

线扫相机DALSA--分频倍频计算公式及原理
分频倍频计算公式及原理 推导原理: 假设编码器脉冲精度为P;同步轮/辊周长为C,Fov为视野,Res为线扫相机分辨率,N代表N倍频编码器,分频为D,倍频为M 线扫项目常规采用N(N 4࿰…
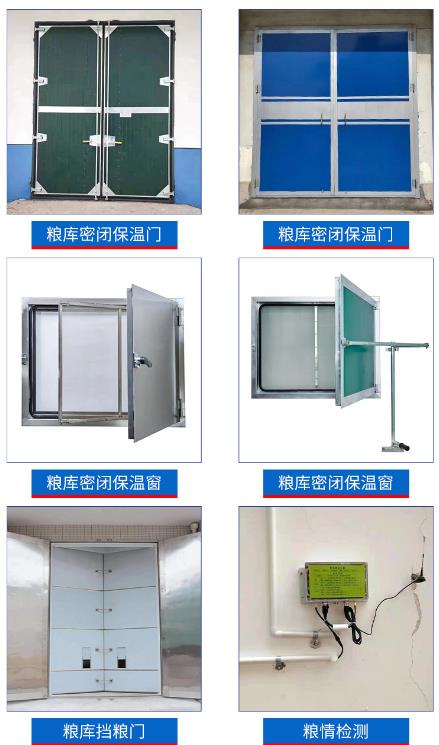
NB-IOT的粮库挡粮门异动监测装置
一种基于NBIOT的粮库挡粮门异动监测装置,包括若干个NBIOT开门监测装置,物联网后台管理系统,NBIOT低功耗广域网络和用户访问终端;各个NBIOT开门监测装置通过NBIOT低功耗广域网络与物联网后台管理系统连接,物联网后台管理系统与用户访问终端连接.NBIOT开门监测装置能够对粮库挡粮…
目标检测 图像处理 计算机视觉 工业视觉
目标检测 图像处理 计算机视觉 工业视觉 工业表盘自动识别(指针型和数值型)智能水尺识别电梯中电动车识别,人数统计缺陷检测(半导体,电子元器件等)没带头盔检测基于dlib的人脸识别抽烟检测和睡岗检测/驾驶疲…

线扫相机DALSA--常见问题三:未找到采集卡
“计算机”右键“管理”,选择“设备管理器”,单击打开“图像设备”,即可看到PC上所安装的采集卡型号,采集卡正常状态表现如上图所示,如果采集卡显示黄色叹号,表明驱动存在异常,解决采集卡丢失问…
海康Visionmaster-环境配置:CSharp 二次开发环境配 置方法
C#二次开发环境的配置方法 以 WinForm 为例,进行 VM 二次开发的环境配置分为三步: 第一步,使用 VS 新建一个框架为.NET Framework 4.6.1 的工程,平台首选 32 位取消勾选,重新生成解决方案,保证工程 Debug 下…
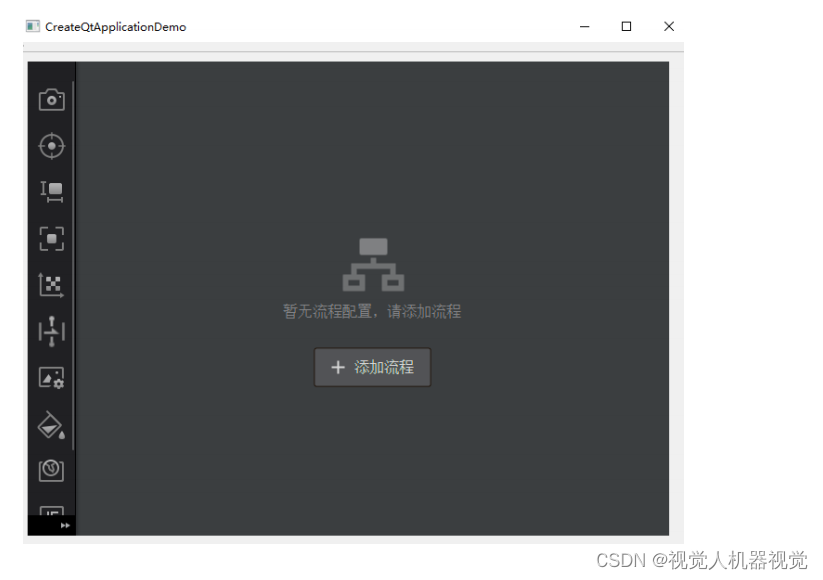
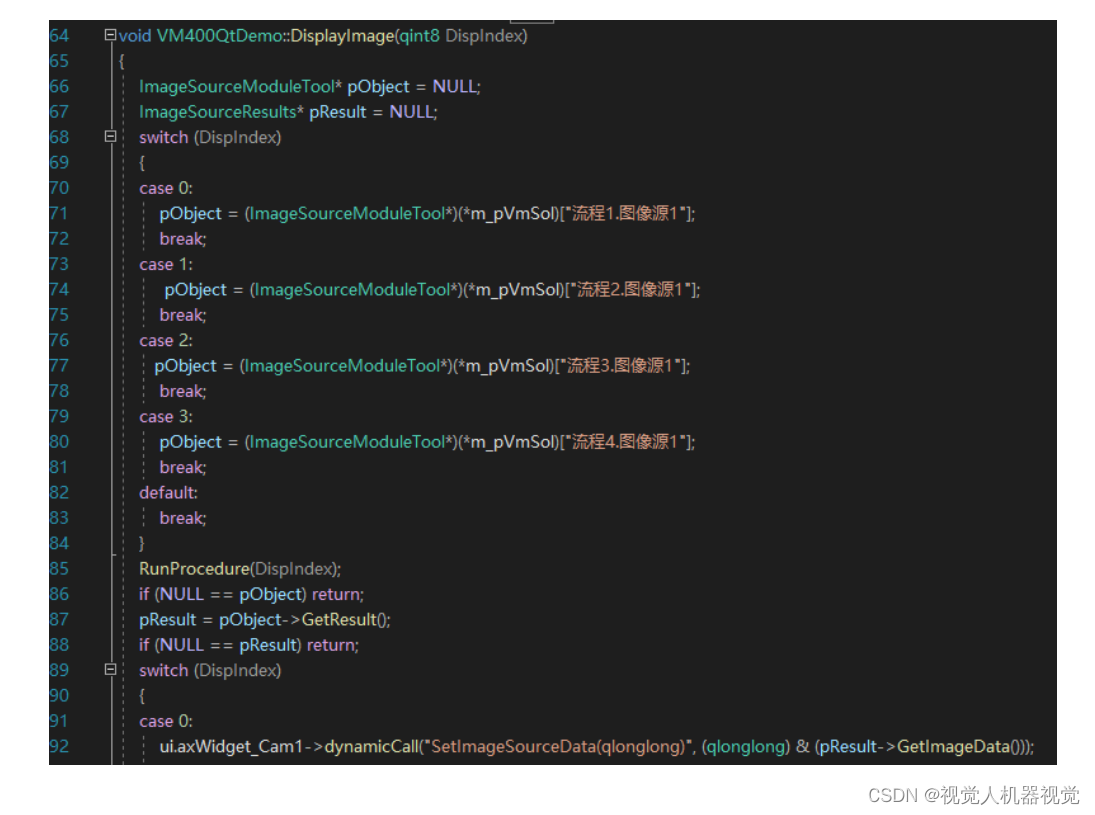
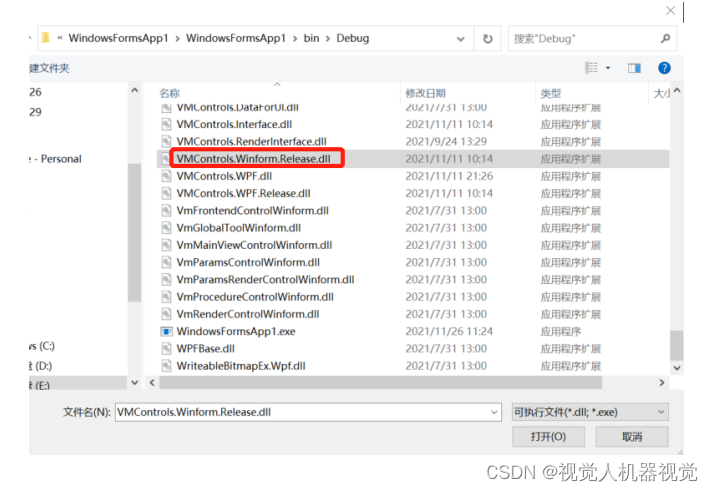
海康Visionmaster-Qt+VS 二次开发环境如何配置?
1 新建 Qt 工程,添加 Qt 模块 Core、GUI、Active Qt 和 Container Widgets 2 拷贝 DLL:VM\VisionMaster4.0.0\Development\V4.0.0\ComControl\bin\x64 下的所有拷贝到项目工程输出目录下,如下图所示,项目的输出路径是 Dll 文件夹。 3 第一…

【Python Opencv】图片与视频的操作
文章目录 前言一、opencv图片1.1 读取图像1.2 显示图像1.3 写入图像1.4 示例代码 二、Opencv视频2.1 从相机捕获视频获取摄像头一帧一帧读取显示图片VideoCapture 中的get和set函数示例代码 2.2 从文件播放视频示例代码 2.3 保存视频示例代码 总结 前言
在计算机视觉和图像处理…

我又开始贩卖焦虑了,机器视觉兄弟们,打工这生意盘不活了?让人逃离北上广深,是毒鸡汤吗?
我想大多数人和我想的一样,不要质疑自己的出身,也不必用一生去改变出身而获得融入感,思想富足这是我们留给自己一生最珍贵的礼物。也许一线城市容不下肉身,二三线城市容不下灵魂。那我回到生我养我的十八线小县城,这不…

机器视觉兄弟们,新工作之前,不要过度准备
大家对工作的渴望我感同身受,有人去机器视觉培训机构培训,有人默默无闻地努力学习,不都是为了一份高新好工作吗? 实际上是: 技术高的人,劳动力贬值。 技术低的人,没有生存空间。 你有野心&…
变电站监控视频中运动异常运动物检测和跟踪技术的研究
对于变电站而言,环境监控的主要内容包括了运动物体的检测、自动识别报警和跟踪等等情况,在某些特殊场所或者是发生特别事故的情况下,人类可能不方便或者无法亲自到现场查看,这时只有通过实时监视来完成需要的工作。本题主要研究变…
Baumer工业相机堡盟工业相机如何使用BGAPISDK生成视频(C++)
Baumer工业相机
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计数和识别、运动分析和图像处理
Baumer的万兆网相机拥有出色的图像处理性能,可以实时传输高分辨率图像。此外,该相机还…
V3Det大规模词汇视觉检测数据集与LaRS海上全景障碍物检测数据集
V3Det与LaRS是ICCV2023上发表的数据集工作,规模都比较大,后续有可能会用到,因此记录下来。
V3Det: Vast Vocabulary Visual Detection Dataset
Paper: https://arxiv.org/abs/2304.03752
URL: https://v3det.openxlab.org.cn/ 在现实世界中…
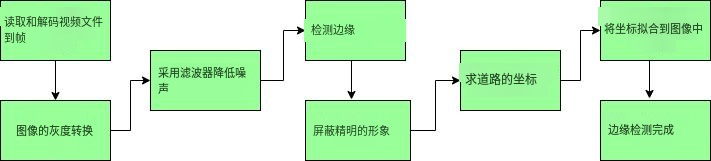
OpenCV—自动驾驶实时道路车道检测(完整代码)
自动驾驶汽车是人工智能领域最具颠覆性的创新之一。在深度学习算法的推动下,它们不断推动我们的社会向前发展,并在移动领域创造新的机遇。自动驾驶汽车可以去传统汽车可以去的任何地方,并且可以完成经验丰富的人类驾驶员所做的一切。但正确地训练它是非常重要的。自动驾驶汽…
实时检测并识别视频中的汽车车牌
对于基于摄像头监控的安全系统来说,识别汽车牌照是一项非常重要的任务。我们可以使用一些计算机视觉技术从图像中提取车牌,然后我们可以使用光学字符识别来识别车牌号码。在这里,我将引导您完成此任务的整个过程。 要求:
import cv2import numpy as npfrom skimage impor…

筛网孔径测量方法,您了解多少?
筛网是一种表面有均匀而稳定的透气孔、具有筛选和过滤作用的工业用品,常见的有金属丝编织网和冲孔板筛网,广泛用于新能源汽车、太阳能光伏、冶金、煤炭、橡胶、石油、化工、制药、建材、粮油等行业。
筛网有着严格的网孔尺寸规范,需要符合标…
Halon 模板匹配流程
读取图片 read_image 灰度筛选 threshold 面积筛选 select_shape 分区 connection 膨胀(填充缝隙) dilation_circle 勾画边缘(轮廓) gen_contour_region_xld 建立轮廓模型 create_scaled_shape_model_xld (Contours, ‘auto…
精密注塑件表面缺陷检测视觉方案
精密注塑制件的表面通常存在着细微的气泡、漏底、划痕和印记等缺陷,影响产品质量。
目前,在注塑制件表面缺陷检测环节中大多依赖于人的肉眼观察,其受主观因素的影响很大,且存在精度有限和成本较高等问题。
近年来,随…
基于Kinect的红外单目图像测距
摘 要
随着Kinect的兴起,深度图像处理迅速变成图像处理和计算机视觉领域的热点。基于Kinect的应用也日渐增多。但是,由于Kinect深度测距原理所限,Kinect的深度图像存在以下四个方面的问题:与距离的平方成正比的噪声、由无效像素组…
基于opencv+ImageAI+tensorflow的智能动漫人物识别系统——深度学习算法应用(含python、JS、模型源码)+数据集(三)
目录 前言总体设计系统整体结构图系统流程图 运行环境爬虫模型训练实际应用 模块实现1. 数据准备1)爬虫下载原始图片2)手动筛选图片 2. 数据处理1)切割得到人物脸部2)重新命名处理后的图片3)添加到数据集 3. 模型训练及…

4G自动变焦云台球机摄像头如何解决低功耗问题?
目前也很多4G球机,不过对于工业的应用,可能还需要有针对性的球机方案? 比如,大家关心的功耗问题,在无电无网的情况下,偏远山区,对于一些油田的管控,输线电路可视化监控,天然气管道的…

【稳定检索|投稿优惠】2024年光电信息与机器人发展国际会议(ICOIRD 2024)
2024年光电信息与机器人发展国际会议(ICOIRD 2024) 2024 International Conference on Optoelectronic Information and Robot Development(ICOIRD 2024) 一、【会议简介】 信息技术与人工智能的浪潮正在激荡,不断刷新我们生活的页面,深刻烙印在光电信息…

重磅!2023中国高校计算机大赛-人工智能创意赛结果出炉
目录 中国计算机大赛-人工智能创意赛现场C4-AI大赛颁奖及留影800个AI应用?这届大学生真能“搞事情”AI原生时代,百度要再培养500万大模型人才 中国计算机大赛-人工智能创意赛现场
12月8日,杭州,一位“白发老人”突然摔倒在地&…
AI视觉检测在制造业缺陷检测中的运用
在工业制造业中, AI结合机器视觉技术正日益成为一种革命性的进步。这种结合不仅提高了生产效率, 还提升了产品质量和安全性。
AI和深度学习的简介
AI,或人工智能,是指使计算机系统模拟人类智能的科技。其中,深度学习…
基于VGG-16+Android+Python的智能车辆驾驶行为分析—深度学习算法应用(含全部工程源码)+数据集+模型(四)
目录 前言总体设计系统整体结构图系统流程图 运行环境模块实现1. 数据预处理2. 模型构建3. 模型训练及保存4. 模型生成 系统测试1. 训练准确率2. 测试效果3. 模型应用 相关其它博客工程源代码下载其它资料下载 前言
本项目采用VGG-16网络模型,使用Kaggle开源数据集…
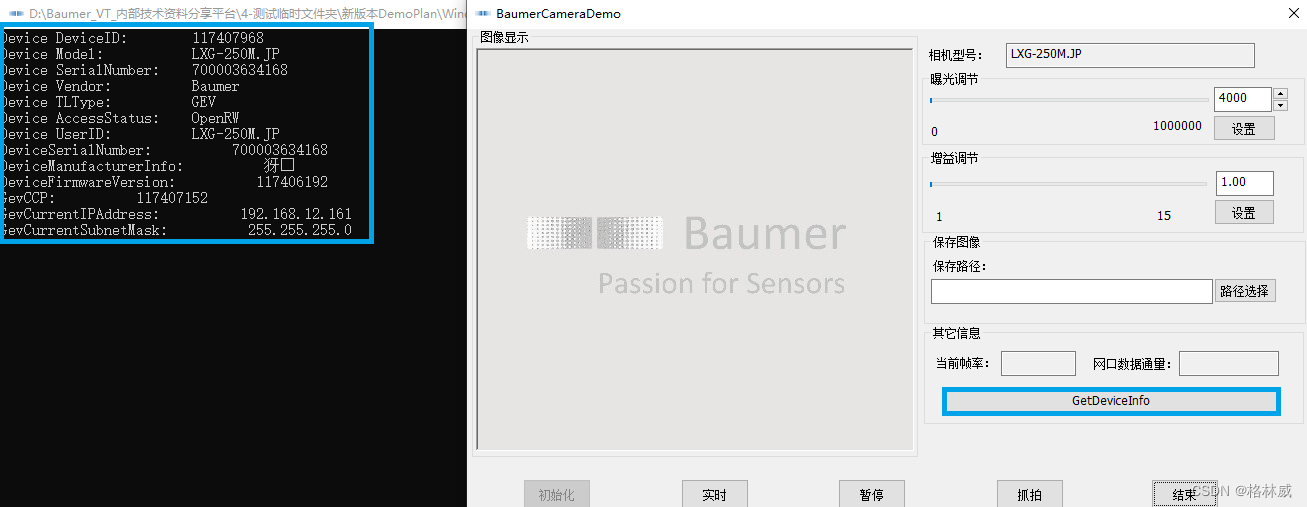
Baumer工业相机堡盟工业相机如何通过BGAPISDK获取相机的各种信息如SN/ID等等(C++)
Baumer工业相机堡盟工业相机如何通过BGAPISDK获取相机的各种信息如SN/ID等等(C) Baumer工业相机Baumer工业相机通过SDK获取相关生产信息的技术背景通过SDK获取相机信息的代码分析获取Baumer工业相机相关信息Baumer工业相机相关参数信息获取的测试 Baumer…
机器视觉系统选型-工业相机的焦距
机器视觉项目需要尽快完成,需要有能力,有技术,经过项目的毒打过的老员工才可以扛起“战时状态”大旗,并且充分完成此类机器视觉项目,毫不夸张地说,就是公司机器视觉项目的顶梁柱。老员工就是机器视觉公司的…
嵌入式linux开发——stm32mp1完成视觉检测(一)
这里从今天开始给自己挖坑然后慢慢填坑……
打算基于自己买的正点原子的stm32mp157开发板还有OV5640摄像头,完成一个视觉检测的项目,最基础的版本是直接OpenCV打开摄像头然后完成简单的检测;进阶版把sklearn训练的模型通过cpp读取然后显示&a…
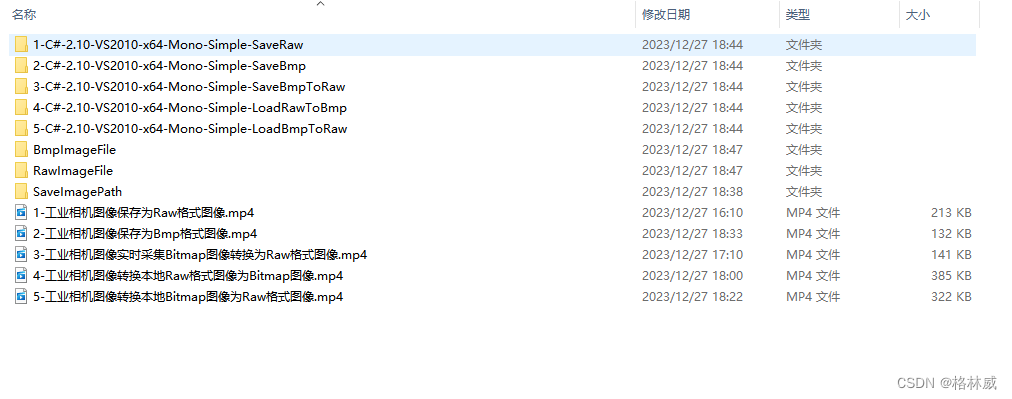
基于机器视觉工业相机的Raw图像和Bitmap图像的保存和转换(C#代码,UI界面版)
基于机器视觉工业相机的Raw图像和Bitmap图像的保存和转换(C#代码,UI界面版) 工业相机图像格式工业相机实现Raw图像和Bitmap图像的保存和转换的技术背景在相机SDK中获取图像转换图像的代码分析工业相机回调函数里保存Bitmap图像数据工业相机图…
机器视觉系统选型-选型-总结
一:明确需求 需求:镜面材质上的划痕检测,传送线上运动过程中拍照,无景深要求,传送线速度0.8m/s,产品间隔50mm 产品大小:100*80mm 工作距离限制:≤ 300mm 最小划痕宽度:0.…
Baumer工业相机堡盟工业相机如何联合NEOAPI SDK和OpenCV实现相机图像转换为Mat图像格式(C#)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK实现相机掉线自动重连(C#) Baumer工业相机Baumer工业相机的图像转换为OpenCV的Mat图像的技术背景在NEOAPI SDK里实现相机图像转换为Mat图像格式联合OpenCV实现相机图像转换为Mat图像格式测试演示图 工业相机…
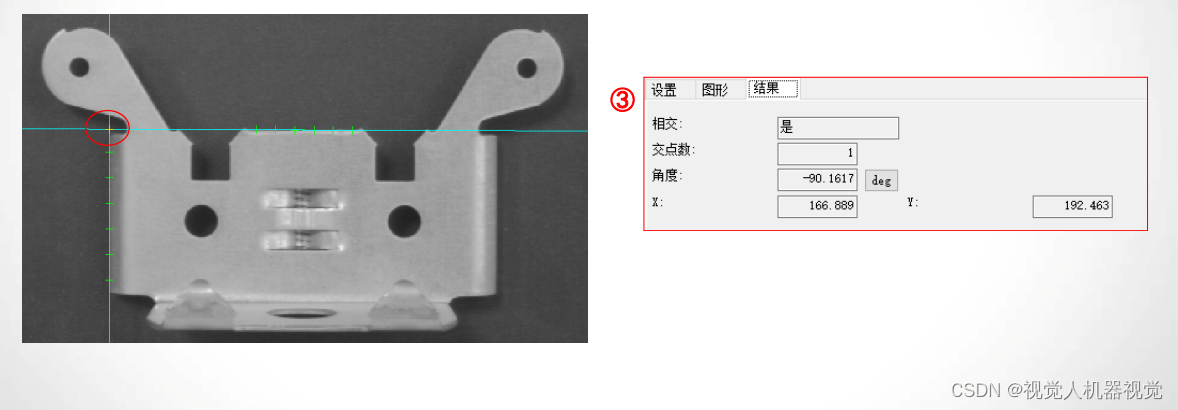
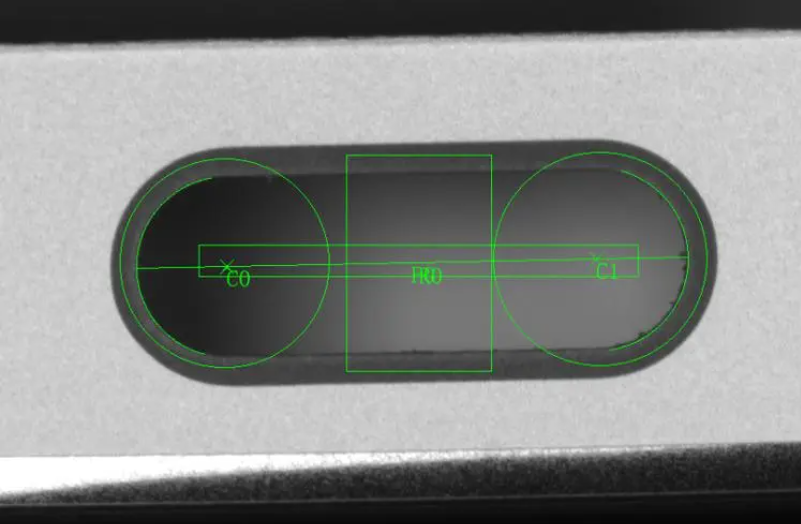
康耐视visionpro-CogIntersectLineLineTool工具详细说明
CogIntersectLineLineTool功能说明: 创建两条线的交点 备注:在“Geometry-Intersection”选项中的所有工具都是创建两个图形的交点工具,其中包括圆与圆的交点、 线与圆的交点、线与线的交点、线与圆的交点等,工具使用的方法相似。…

机器视觉兄弟们,没有项目订单,机器视觉项目行业难题来了
产品没一个正形,光源像是打了几十年的光棍一样,偏偏配不上,n次“相亲”之后图像硬是“阴晴圆缺”,老板阴阳怪气你这打不出来,给客户看之后说,这都打不出来,你们不行啊。
我听了后真想ÿ…

Baumer工业相机堡盟工业相机如何通过NEOAPI SDK实现相机掉线自动重连(C#)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK实现相机掉线自动重连(C#) Baumer工业相机Baumer工业相机的掉线自动重连的技术背景通过PnP事件函数检查Baumer工业相机是否掉线在NEOAPI SDK里实现相机掉线重连方法:工业相机掉线重连测试演示图…
Baumer工业相机堡盟工业相机如何联合NEOAPI SDK和OpenCV实现相机图像转换为AVI视频格式(C++)
Baumer工业相机堡盟工业相机如何联合NEOAPI SDK和OpenCV实现相机图像转换为视频格式(C#) Baumer工业相机Baumer工业相机的图像转换为OpenCV的图像的技术背景在NEOAPI SDK里实现相机图像转换为视频格式 工业相机通过OpenCV实现相机图像转换为视频格式的优…

网页实现-基于深度学习的车型识别与计数系统(YOLOv8/v7/v6/v5代码+训练数据集)
摘要:本文深入研究了基于YOLOv8/v7/v6/v5的车型识别与计数,核心采用YOLOv8并整合了YOLOv7、YOLOv6、YOLOv5算法,进行性能指标对比;详述了国内外研究现状、数据集处理、算法原理、模型构建与训练代码,及基于Streamlit的…
基于深度学习的田间杂草检测系统(网页版+YOLOv8/v7/v6/v5代码+训练数据集)
摘要:本博客深入探讨了基于YOLOv8/v7/v6/v5的田间杂草检测系统,其中核心采用YOLOv8并整合了YOLOv7、YOLOv6、YOLOv5算法,进行性能指标对比;详细介绍了国内外研究现状、数据集处理、算法原理、模型构建与训练代码,以及基…
Baumer工业相机堡盟工业相机如何联合NEOAPI SDK和OpenCV实现获取图像并对图像进行边缘检测(C++)
Baumer工业相机堡盟工业相机如何联合NEOAPI SDK和OpenCV实现获取图像并对图像进行边缘检测(C) Baumer工业相机Baumer工业相机使用OpenCV对图像进行边缘检测的技术背景在NEOAPI SDK里使用OpenCV建立边缘检测功能在NEOAPI SDK里使用边缘检测功能对图像进行…
机器视觉定位系统涉及到哪些技术?
机器人机器视觉系统是一种技术,它使机器人能够通过图像处理和识别技术来感知和理解其周围环境,进而实现智能操作。机器视觉是机器人感知能力的重要组成部分,使得机器人能够像人一样通过视觉来获取信息,理解并处理环境。
机器人机…
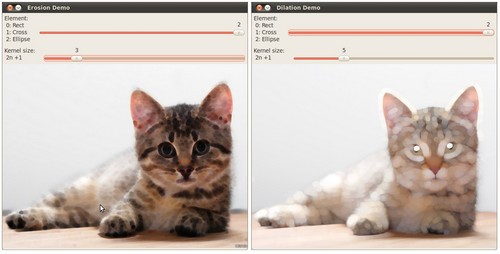
OpenCV4.9侵蚀和扩张
返回:OpenCV系列文章目录(持续更新中......)
上一篇:OpenCV4.9处理平滑图像
下一篇:OpenCV系列文章目录(持续更新中......) 目标
在本教程中,您将学习如何:
应用两个…
Baumer工业相机堡盟工业相机如何联合NEOAPI SDK和OpenCV实现获取图像并对图像进行边缘检测(C#)
Baumer工业相机堡盟工业相机如何联合NEOAPI SDK和OpenCV实现获取图像并对图像进行边缘检测(C#) Baumer工业相机Baumer工业相机使用OpenCV对图像进行边缘检测的技术背景在NEOAPI SDK里使用OpenCV建立边缘检测功能在NEOAPI SDK里使用边缘检测功能对图像进行…
【issue-halcon例程学习】measure_arc.hdev
例程功能 检查倒角后铸件的细长孔之间的距离。
代码如下
read_image (Zeiss1, zeiss1)
get_image_size (Zeiss1, Width, Height)
dev_close_window ()
dev_open_window (0, 0, Width / 2, Height / 2, black, WindowHandle)
set_display_font (WindowHandle, 14, mono, true,…
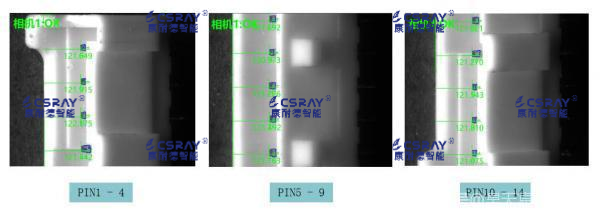
【issue-halcon例程学习】fuzzy_measure_pin.hdev
例程功能 检查IC的引线宽度和引线距离。
代码如下
dev_close_window ()
read_image (Image, board/board-06)
get_image_size (Image, Width, Height)
dev_open_window (0, 0, Width, Height, black, WindowHandle)
*
* --- Fuzzy Measure:
Row1 : 305.5
Col1 : 375.5
Phi1 …
【issue-halcon例程学习】edges_color.hdev
例程功能 演示如何使用edges_color,展示只能从彩色图像中提取某些边缘的图像,说明edges_color和edges_image输出之间的差异。
代码如下
dev_update_off ()
read_image (Image, olympic_stadium)
get_image_size (Image, Width, Height)
dev_close_wind…
视觉检测系统:工厂生产零部件的智能检测
在工厂的生产加工过程中,工业视觉检测系统被广泛应用,并且起着重要的作用。它能够对不同的零部件进行多功能的视觉检测,包括尺寸和外观的缺陷。随着制造业市场竞争越来越激烈,对产品质检效率的要求不断提高,传统的人工…

为什么我一直是机器视觉调机仔,为什么一定要学一门高级语言编程?
为什么我是机器视觉调机仔,为什么一定要学一门高级语言编程,以后好不好就业,待遇高不高,都是跟这项技术没关系,是跟这个技术背后的行业发展有关系。 你可以选择离机器视觉行业,也可以选择与高级语言相关…
【异常检测复现】【DeSTSeg】在虚拟环境中完成配置
文章目录 1.在虚拟环境中安装git2.更改虚拟环境中包的安装位置3.安装anomalib4.安装虚拟环境5.根据requirements.txt安装包6.选择所建立的虚拟环境,并设置解释器7.查看文件夹的内容8.下载数据集9.引用 记录复现过程中安装各种包的命令 下载数据集到本地 1.在虚拟环境…
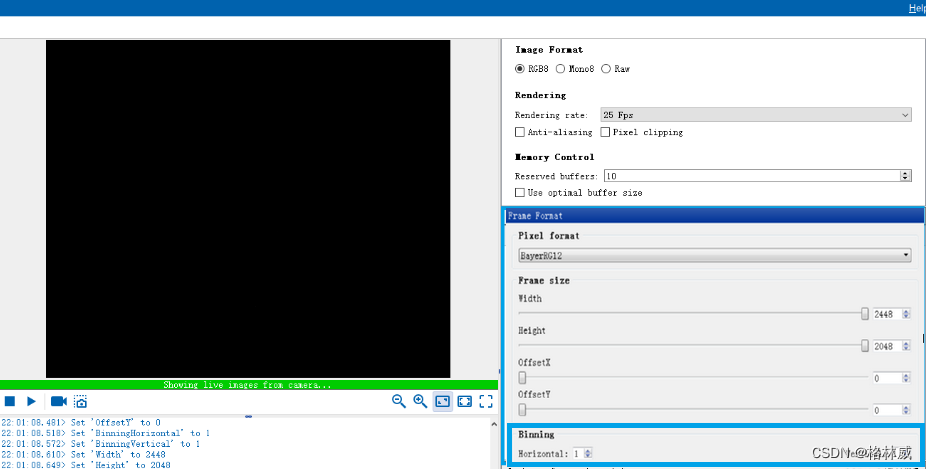
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK使用Binning像素合并功能(C#)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK使用Binning像素合并功能(C#) Baumer工业相机Baumer工业相机NEOAPI SDK和短曝光功能的技术背景Baumer工业相机通过CameraExplorer软件使用Binning功能Baumer工业相机通过NEOAPI SDK使用Binning功能1.引用合…
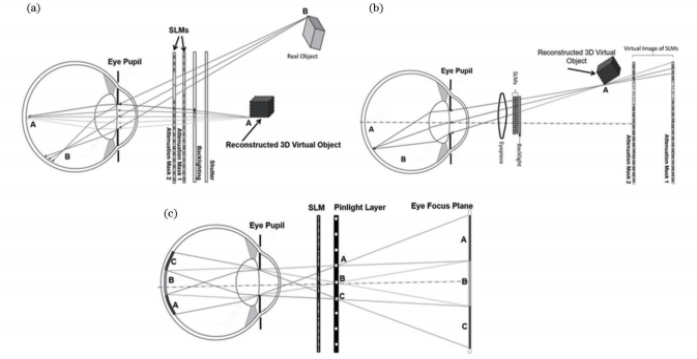
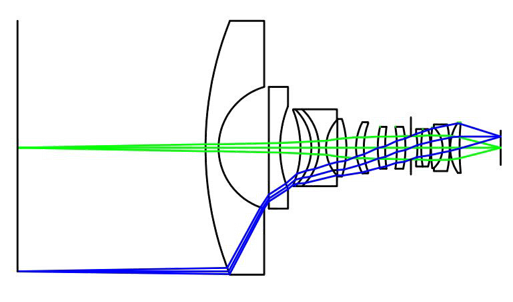
【前沿】头戴式光场显示技术研究进展
摘要:光场显示器旨在通过重建三维场景在不同方向发出的几何光线来渲染三维场景的视觉感知,从而为人的视觉系统提供自然舒适的视觉体验,解决传统平面立体三维显示器中的聚散调节冲突问题。近年来,多种光场显示方法被尝试应用到头戴…
人工智能绘画的时代下到底是谁在主导,是人类的想象力,还是AI的创造力?
#ai作画
目录
一.AI绘画的概念
1. 数据集准备:
2. 模型训练:
3. 生成绘画:
二.AI绘画的应用领域
三.AI绘画的发展
四.AI绘画背后的技术剖析
1.AI绘画的底层原理
2.主流模型的发展趋势
2.1VAE — 伊始之门
2.2GAN
2.2.1GAN相较于…
【issue-halcon例程学习】edge_segments.hdev
例程功能 提取连续的边缘
代码如下
dev_update_off ()
dev_close_window ()
* ****
* step: acquire image
* ****
read_image (Image, mreut)
get_image_size (Image, Width, Height)
dev_open_window_fit_image (Image, 0, 0, Width, Height, WindowID)
set_display_font (…
【文献阅读笔记】基于自监督的异常检测和定位:SSM
2022 IEEE TRANSACTIONS ON MULTIMEDIA 领域:异常检测 目标:图像输入数据 文章目录 1、模型2、方法2.1、random masking2.2、restoration network2.3、损失函数2.4、推理时的渐进细化 3、实验4、引用5、想法 1、模型 训练: 每个图像实时生成随…
高性能计算机在人工智能中的运用
随着人工智能技术的不断发展和突破,高性能计算机已经成为推动人工智能研究和应用的重要基础设施之一。高性能计算机以其强大的计算能力和数据处理能力,为人工智能领域带来了许多创新和进步。本文将介绍高性能计算机在人工智能中的运用,探讨其…
Labview 图像处理系统设计
1. 总体主界面设计
前面板界面如下: 界面总共分为一个实时采集加拍照控制模块,两个图像显示模块(实时图像显示和直方图显示)以及三个图像处理模块
前面板中各模块具体功能及使用说明如下: 1.当实时按钮关闭时&#x…
Video anomaly detection with spatio-temporal dissociation 论文阅读
Video anomaly detection with spatio-temporal dissociation 摘要1.介绍2.相关工作3. Methods3.1. Overview3.2. Spatial autoencoder3.3. Motion autoencoder3.4. Variance attention module3.5. Clustering3.6. The training objective function 4. Experiments5. Conclusio…
Baumer工业相机堡盟工业相机如何通过BGAPI SDK实现Raw格式的图像保存(C#)
Baumer工业相机堡盟工业相机如何通过BGAPI SDK实现Raw格式的图像保存(C#) Baumer工业相机Baumer工业相机通过SDK实现Raw格式的图像保存的技术背景通过SDK获取相机信息的代码分析Baumer工业相机回调函数里保存原始图像数据Baumer保存Raw图像格式重要核心代…
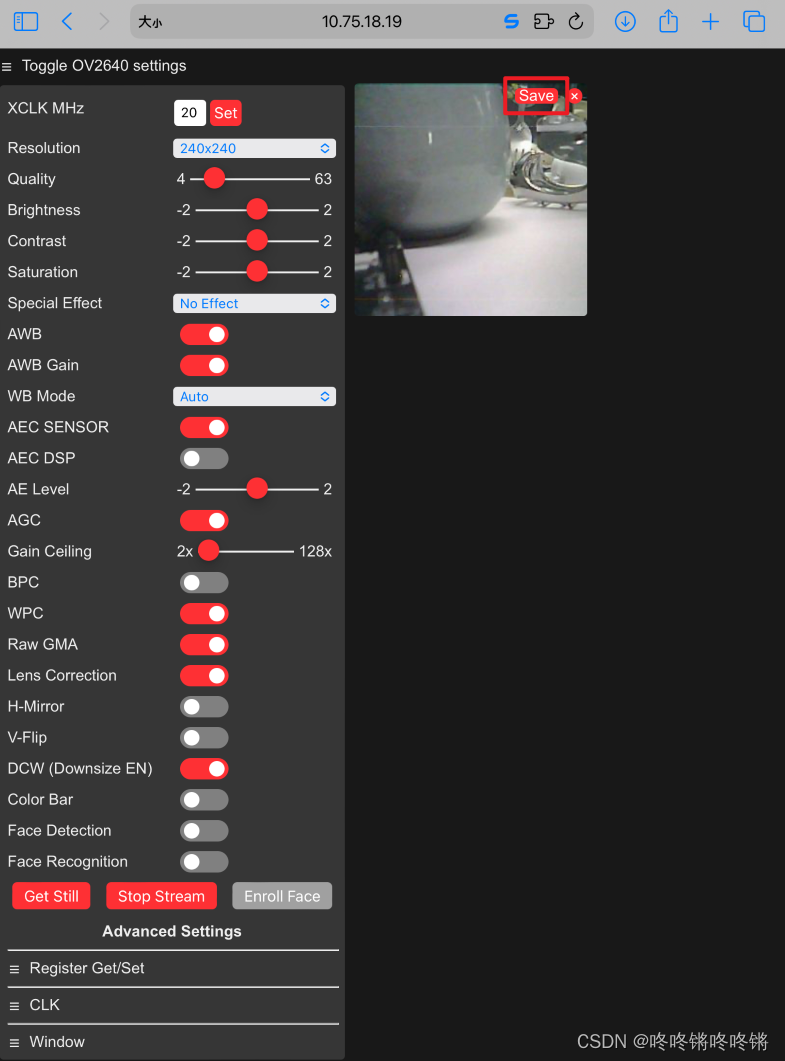
esp32-cam使用SD卡/web端保存拍摄图片到本地
目录 一、esp32-cam运行esp-who的人脸识别报错 二、挂载sd卡到esp32-cam,并将拍摄的图片保存到sd卡三、通过web示例对拍摄的图片进行保存 保存拍摄图片主要是想加在人脸识别这个项目中,所以先把人脸识别示例跑通,然后在把挂在sd卡的部分放进来…
基于视觉定位技术选型
视觉定位技术定义 介绍 本文档旨在帮助您选择基于视觉定位技术的方案。视觉定位技术是指利用计算机视觉和机器学习等技术,对图像中的物体进行识别、定位和跟踪,以实现对物体的感知和控制。本文将介绍基于视觉定位技术的优缺点、适用场景和选型方案。
基…
【issue-halcon例程学习】rim_simple.hdev
例程功能
找钻孔直径。
代码如下
dev_update_off ()
* ****
* step: acquire image
* ****
read_image (Image, rim)
get_image_size (Image, Width, Height)
dev_open_window_fit_image (Image, 0, 0, Width, Height, WindowID)
set_display_font (WindowID, 14, mono, tru…

视觉开发板—K210自学笔记(六)
视觉开发板—K210
本期我们继续来遵循其他控制器的学习路线,在学习完GPIO的基本操作后,我们来学一个非常重要的UART串口通信。为什么说这个重要呢,通常来说我们在做一个稍微复杂的项目的时候K210作为主控的核心可能还有所欠缺,另…
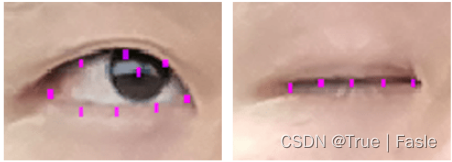
使用OpenCV实现人脸特征点检测与实时表情识别
引言: 本文介绍了如何利用OpenCV库实现人脸特征点检测,并进一步实现实时表情识别的案例。首先,通过OpenCV的Dlib库进行人脸特征点的定位,然后基于特征点的变化来识别不同的表情。这种方法不仅准确度高,而且实时性好&am…

机器视觉检测设备的组成要素
机器视觉检测设备是一种先进的自动化检测技术工具,它利用光学、图像处理和计算机硬件及软件技术模拟并扩展人类的视觉功能,以实现对产品或目标物体进行自动化的尺寸测量、缺陷检测、表面质量评估、颜色识别、形状匹配以及位置判断等功能。这种设备通常包…

【视频异常检测】Diversity-Measurable Anomaly Detection 论文阅读
Diversity-Measurable Anomaly Detection 论文阅读 Abstract1. Introduction2. Related Work3. Diversity-Measurable Anomaly Detection3.1. The framework3.2. Information compression module3.3. Pyramid deformation module3.4. Foreground-background selection3.5. Trai…
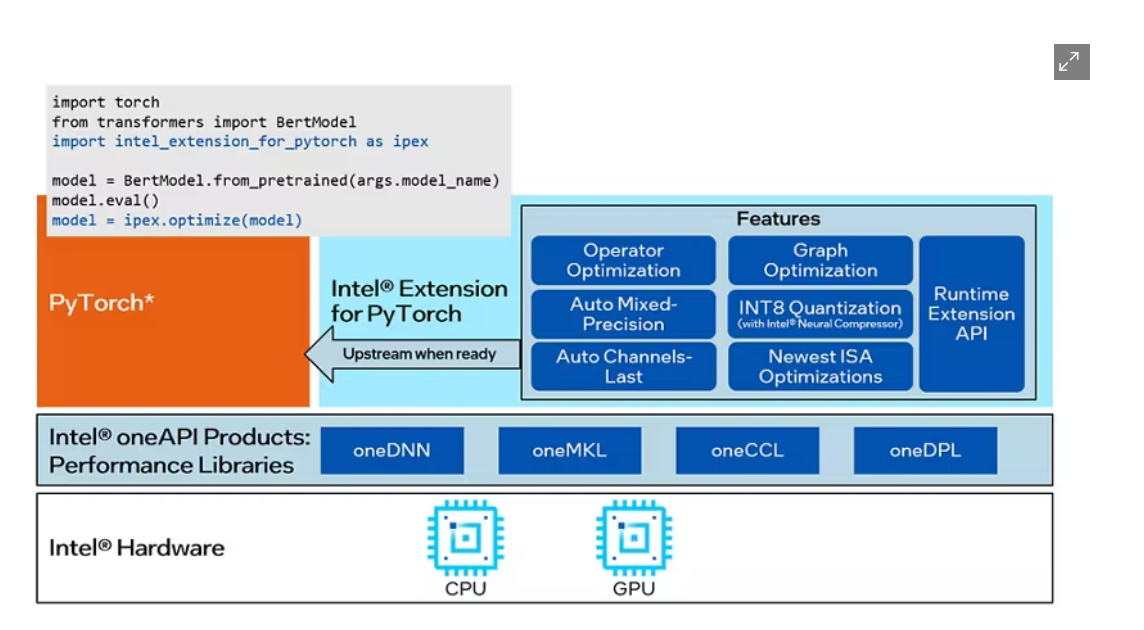
【Intel oneAPI实战】使用英特尔套件解决杂草-农作物检测分类的视觉问题
目录 一、简介:计算机视觉挑战——检测并清除杂草二、基于YOLO的杂草-农作物检测分类2.1、YOLO简介2.2、基于YOLO的杂草-农作物检测分类解决方案 三、基于YOLO的杂草-农作物检测分类系统设计3.1、基于flask框架的demo应用程序后端3.2、基于Vue框架的demo应用程序前端…
点胶缺陷视觉检测都是怎么检测的?
点胶工艺是许多工业生产中不可或缺的一环,而点胶缺陷的存在往往直接影响到产品质量。为了提升点胶工艺的品质控制,点胶缺陷的视觉检测成为了一个重要的技术手段。 一、点胶缺陷的类型
点胶缺陷主要包括胶点大小不均、位置偏移、漏点、多点等。这些缺陷如…
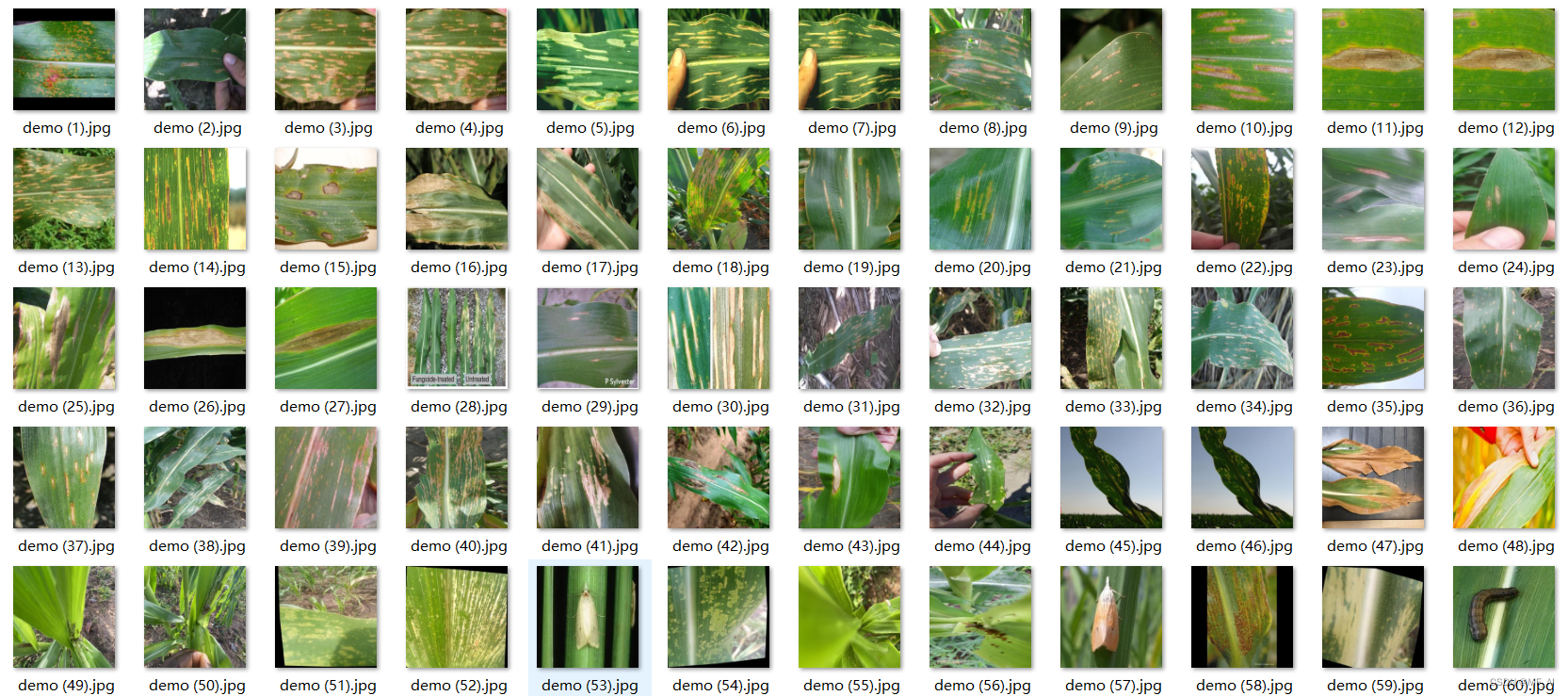
植物病虫害:YOLO玉米病虫害识别数据集
玉米病虫害识别数据集:玉米枯萎病,玉米灰斑病,玉米锈病叶,粘虫幼虫,玉米条斑病,黄二化螟,黄二化螟幼虫7类,yolo标注完整,3900多张图像,全部原始数据ÿ…

多场成像,快速提高机器视觉检测能力--51camera
多阵列CMOS传感器与芯片级涂层二向色滤光片相结合,可在单次扫描中同时捕获明场、暗场和背光图像。 多场成像是一种新的成像技术,它可以在不同的光照条件下同时捕获多幅图像。再加上时间延迟积分(TDI),这种新兴的成像技术可以克服许多限制的传…

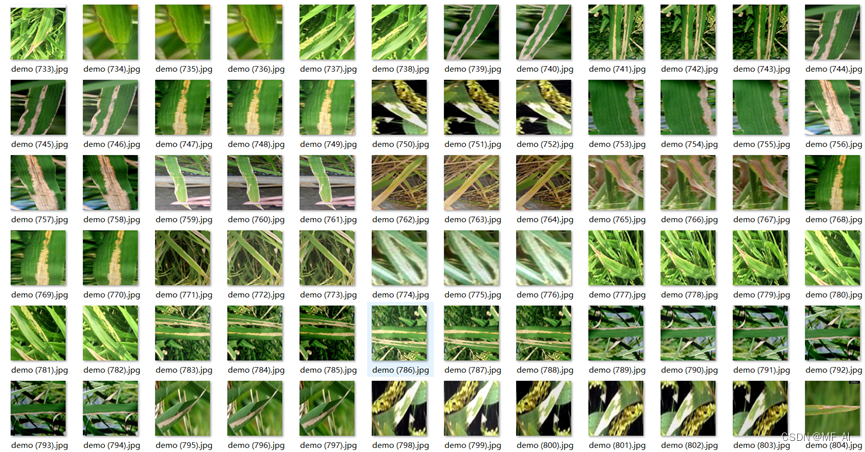
植物病害识别:YOLO水稻病害识别数据集(11000多张,yolo标注)
YOLO水稻病害识别数据集,包含叶斑病,褐斑病,细菌性枯萎病,东格鲁病毒病4个常见病害类别,共11000多张图像,yolo标注完整,可直接训练。 适用于CV项目,毕设,科研,…
AI:92-基于深度学习的红外图像人体检测
🚀 本文选自专栏:人工智能领域200例教程专栏 从基础到实践,深入学习。无论你是初学者还是经验丰富的老手,对于本专栏案例和项目实践都有参考学习意义。 ✨✨✨ 每一个案例都附带有在本地跑过的核心代码,详细讲解供大家学习,希望可以帮到大家。欢迎订阅支持,正在不断更新…

反无人机电子护栏:原理、算法及简单实现
随着无人机技术的快速发展,其在航拍、农业、物流等领域的应用日益广泛。然而,无人机的不规范使用也带来了安全隐患,如侵犯隐私、干扰航空秩序等。为了有效管理无人机,反无人机电子护栏技术应运而生。
目录
一、反无人机电子护栏…
【issue-halcon例程学习】lines_gauss.hdev
例程功能
代码如下
dev_close_window ()
read_image (Angio, angio-part)
get_image_size (Angio, Width, Height)
dev_open_window (0, 0, 3 * Width / 2, 3 * Height / 2, black, WindowID)
dev_display (Angio)
dev_set_color (blue)
MaxLineWidth : 8
Contrast : 12
calc…
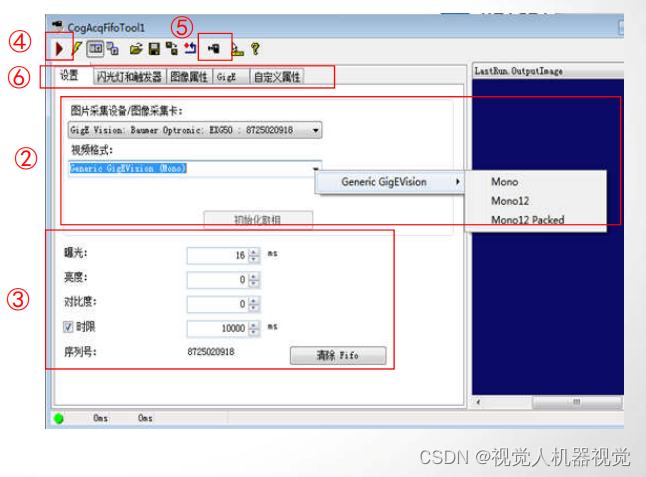
康耐视visionpro-CogAcqFifoTool工具详细说明
CogAcqFifoTool操作说明: ① 打开工具栏,双击或点击鼠标拖拽 添加CogAcqFifoTool ②.从图片采集设备/图像采集卡列表里选择对应的相机,视频格式选择图像格式。 Mono表示黑白图像,RGB表示彩色相机。点击初始化取相初始化相机。 ③…
机器视觉系统:芯片字符瑕疵缺陷检测的“慧眼”
在高度精细化的半导体制造领域,芯片上的字符信息承载着重要的标识和追踪数据。这些字符必须清晰、准确地呈现在芯片表面,以确保生产过程中的可追溯性和产品使用的安全性。然而,由于制造过程中的各种因素,芯片字符可能会出现各种瑕…

机器视觉系统在铜箔生产中的降本增效利器
在铜箔生产过程中,产品质量的控制是确保生产效率和成本效益的关键。传统的铜箔生产检测方法往往依赖于人工目检,这种方法不仅效率低下,而且容易受到人为因素的干扰,导致质量检测的准确性和稳定性受到影响。而机器视觉系统的引入&a…
CCD视觉检测:揭开未来质量检测新篇章——康耐德智能
随着科技的不断进步,传统的人工检测方式已经无法满足现代工业生产对效率和精度的双重需求。而CCD视觉检测技术的出现,正为我们提供了一种全新的解决方案。那么,什么是CCD视觉检测?它又能为我们检测哪些方面的内容呢?今…
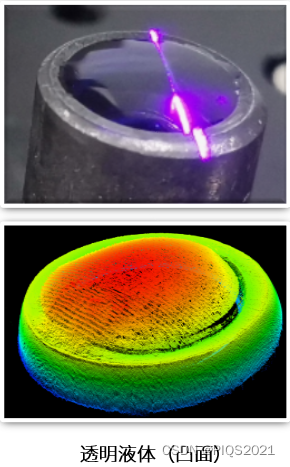
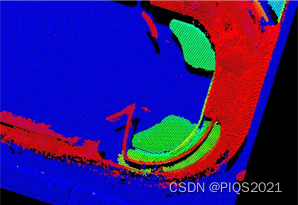
视觉系统对透明胶水的检测都有哪些方案?
透明胶水的检测在工业生产中是一个挑战,因为传统的基于RGB相机的视觉系统通常难以检测透明物体。然而,随着技术的发展,现在有多种方法可以有效地检测透明胶水。
1. 高光谱相机:高光谱相机可以提供不同于传统RGB相机的解决方案。例…
<sa8650>sa8650 partition-之-新增分区加img
<sa8650>sa8650 partition-之-新增分区加img 一、前言二、新增分区2.1 新增用户分区2.2 生成新分区文件2.3 确认新分区文件2.4 rawprogram文件参数解析2.5 新增分区验证三、 镜像文件3.1 新增water.img编译脚本3.2 新增water.img编译脚本运行3.3 新增water.img打包3.4 新增wa…
【视频异常检测】Delving into CLIP latent space for Video Anomaly Recognition 论文阅读
Delving into CLIP latent space for Video Anomaly Recognition 论文阅读 ABSTRACT1. Introduction2. Related Works3. Proposed approach3.1. Selector model3.2. Temporal Model3.3. Predictions Aggregation3.4. Training 4. Experiments4.1. Experiment Setup4.2. Evaluat…
机器视觉系统选型-选型标定通信
必问镜头:光学放大倍率CCD芯片/视野 (长宽同等方向)
计算镜头选型焦距公式CCD芯片尺寸/视野尺寸*物距
曝光单位是毫秒 1秒1000毫秒
物距:物体到透镜表面的距离
为什么要 标定旋转中心:机械手要抓取物料,…
机器视觉系统选型-相机基础知识
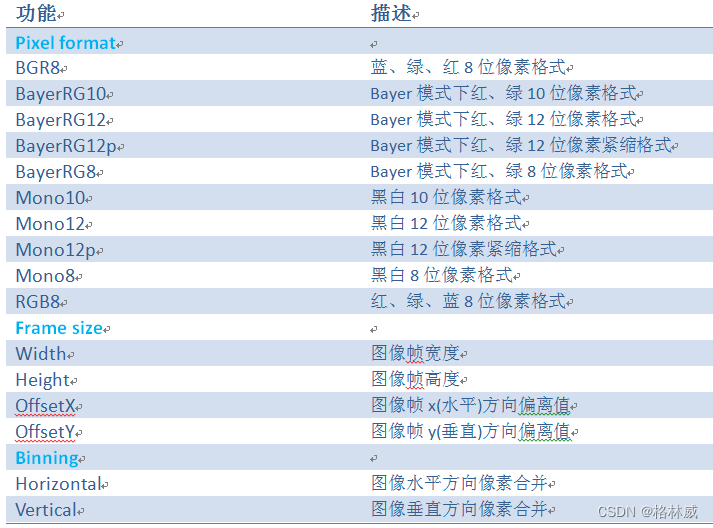
相机基础知识: 分辨率(Resolution):相机采集图像的像素点数 像素分辨率(mm/pixel):每个像素代表的毫米值 快门方式: 全局快门/全域快门(Global Shutter):让整个感光元器件每行像素全部在同一时间…
深度学习:复杂工业场景下的复杂缺陷检测方法
摘要:在复杂的工业场景中,缺陷检测一直是一个重要而具有挑战性的任务。近年来,深度学习技术的快速发展为复杂工业场景下的缺陷检测提供了新的解决方案。本文将介绍深度学习在复杂工业场景下的复杂缺陷检测中的应用,并探讨其技术进…
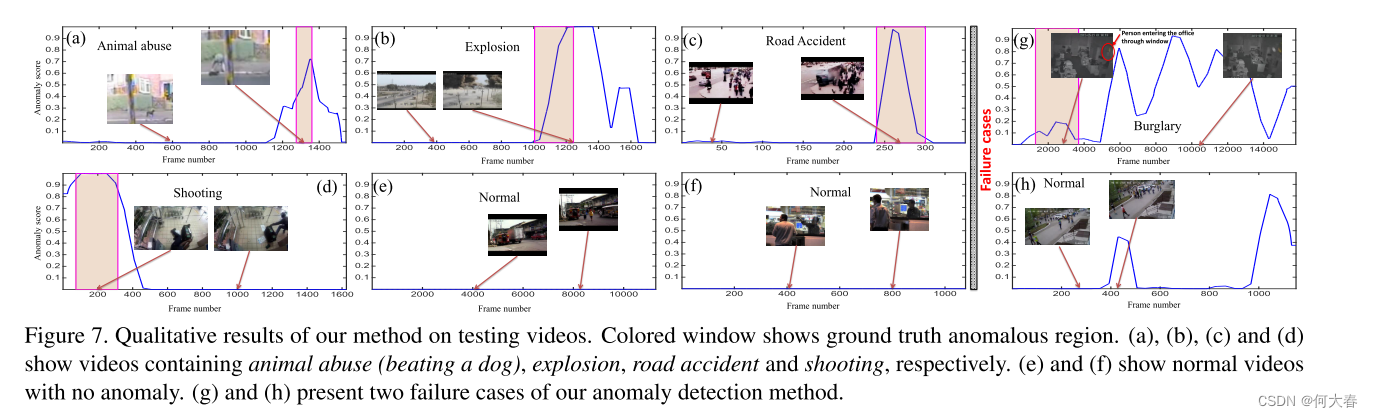
【视频异常检测】Real-world Anomaly Detection in Surveillance Videos 论文阅读
Real-world Anomaly Detection in Surveillance Videos 论文阅读 Abstract1. Introduction2. Related Work3. Proposed Anomaly Detection Method3.1. Multiple Instance Learning3.2. Deep MIL Ranking Model 4. Dataset4.1. Previous datasets4.2. Our dataset 5. Experiment…

从产品组装和维护/维修的角度来看,基于增强现实的指导:关于挑战和机遇的最新综述
作者:
1. M. Eswaran
2. Anil Kumar Gulivindala
3. M.V.A.Raju Bahubalendruni
关于本文
•分析了增强现实在装配和维护/维修中的作用。
•讨论了AR辅助制造系统的软件和硬件元素。
•讨论了AR跟踪和配准技术面临的挑战。
•讨论了AR辅助制造系统的未来…
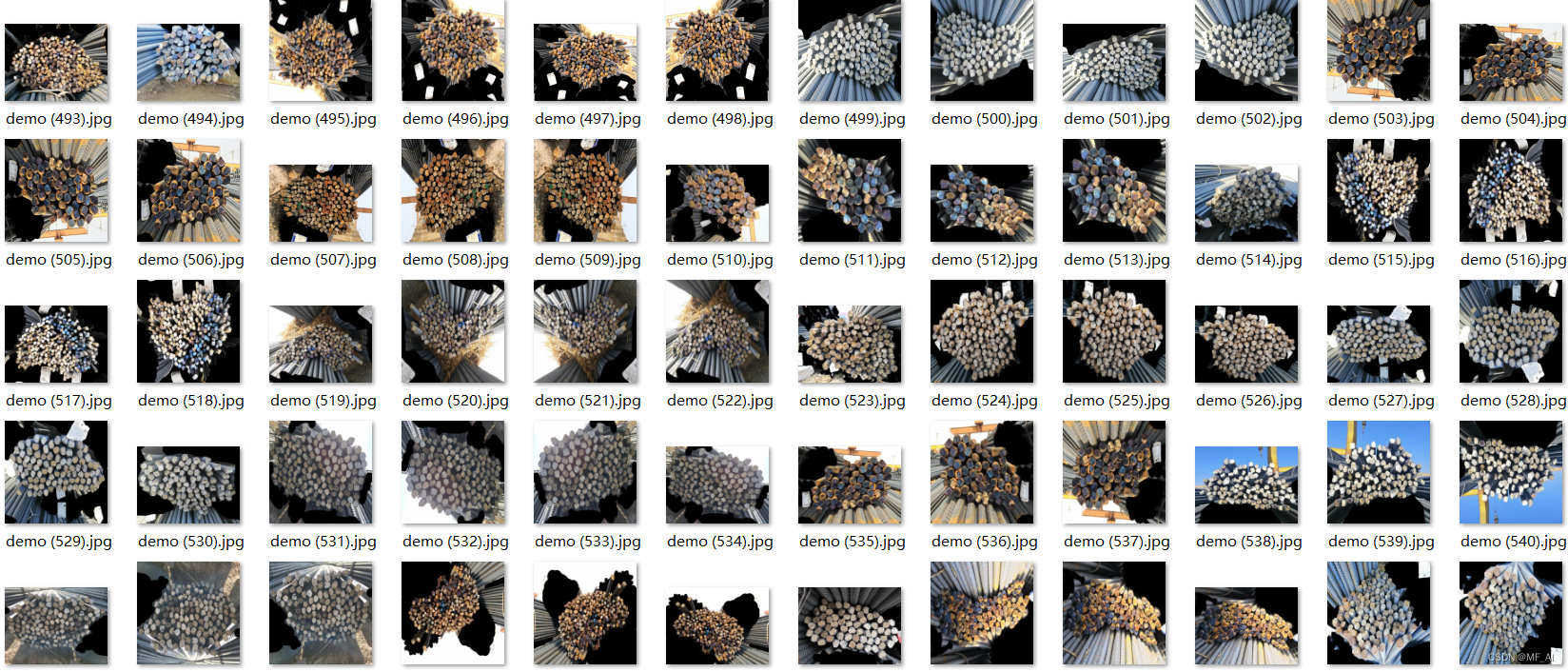
YOLO钢筋检测计数数据集(5000+图像,标注完整)
YOLO钢筋检测计数数据集,包含5125张真实场景下,密集钢筋图像,高精度yolo标注完整,全部原始图像,未使用增强。 适用于CV项目,毕设,科研,实验等
需要此数据集或其他任何数据集请私信
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK实现相机掉线自动重连(C++)
Baumer工业相机堡盟工业相机如何通过NEOAPI SDK实现相机掉线自动重连(C) Baumer工业相机Baumer工业相机的掉线自动重连的技术背景通过PnP事件函数检查Baumer工业相机是否掉线在NEOAPI SDK里实现相机掉线重连方法:工业相机掉线重连测试演示图 …

Pyqt5+Yolov5+Mss实现一个实时桌面检测软件
文章目录写在前面的话一、明确功能目标二、UI设计1.选择主界面三、功能的实现1.构建信号槽,为关闭按钮添加功能2.剥离yolo模型载入代码,载入训练好的模型,封装成函数3.剥离yolo推理代码,封装成函数可以被方便的调用4.使用Qlabel展示图片,并用QtWidgets.QApplication.processEve…
机器视觉检测设备在连接器外观缺陷检测中的应用
作为传输电流或信号连接两个有源器件的器件,连接器被广泛应用于各个行业,从手机、平板、电脑,到冰箱、空调、洗衣机,再到汽车、国防、航空,处处是它的所在。每个电子产品少了连接器将无法运作,因此…

基于深度学习创建-表情符号--附源码
表情符号深度学习概述
如今,我们使用多种表情符号或头像来表达我们的心情或感受。它们充当人类的非语言线索。它们成为情感识别、在线聊天、品牌情感、产品评论等的关键部分。针对表情符号驱动的故事讲述的数据科学研究不断增加。
从图像中检测人类情绪非常流行,这可能是由…
工业镜头中的远心镜头与普通镜头的光路
普通镜头: 主光线与镜头光轴有角度,工件上下移动时,像的大小有变化。 FOV>镜头前端直径。
物方远心镜头: 物方主光线平行于光轴,物距发生改变时,像高不会发生改变,测得的物体尺寸大…
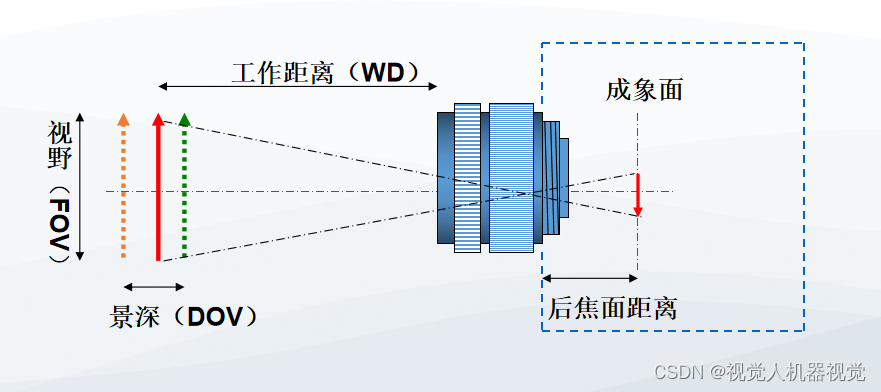
机器视觉系统中的工业镜头的参数
光学倍率 β
焦距 f
F值(光圈)Fno.
数值孔径 NA
工作距离 WD
视场(视场角,视野)
景深DOF
分辨率、分辨力
MTF
畸变

机器视觉康耐视visionpro-脚本常见的编辑编译错误和运行错误及警告性错误,调试解决办法
3.康耐视VisionPro高级脚本系列教程-3.脚本编辑错误和运行错误调试方法,break和Continue的差别_哔哩哔哩_bilibili 目录 第一:康耐视visionpro脚本-编辑编译错误第二:康耐视visionpro脚本-运行错误第三:康耐视visionpro脚本-警告性错误第一:康耐视visionpro脚本-编辑编译…
海康Visionmaster-环境配置:运行出现 Vm.Core.Solu tion 报错的解决方法
(1)检查加密狗有没有插好? 是否以管理员权限启动程序?首选 32 位是否取消勾选? (2)查看 VM4.0 的版本信息是否为最新版本?版本信息为 20220415 以上,版本越新问题就会越少…

工业相机中的不同的图像格式的优缺点
图像格式: (1)JPEG:JPEG文件的扩展名为.jpg或jpeg,体积小、压缩率大, (2)RAW:未经加工的原始数据,体积很大,必须用特殊的阅读器打开; (3)T1FF:是一种压缩图片格式,但是压缩比很低: (4)PNG:可以做…
3D预处理的步骤(关于API,GPU的说明)
3D预处理的步骤(关于API,GPU的说明)
CG在哪里适合? •视觉计算的各个方面 •更广泛使用计算机图形 CG是Computer Graphics IP是Image Processing(also image analysis) CV是Computer Vision(also pattern recognition) 图像可能是真实,合成,…
<sa8650>sa8650 CDT-之-汽车CDT配置用户指南(下)
<sa8650>sa8650 CDT-之-汽车CDT配置用户指南(下) 3 设备树3.1 匹配CDT与DTS3.2 修改CDT信息,以选择不同的设备树4 CDT的使用4.1 CDT在TZ中的使用4.2 CDT在主机中的使用(QNX)4.3 在安卓系统中使用CDT5 计划/条款CDT5.1 程序CDT使用TRACE325.2 程序CDT使用PCAT与窗口机器5…
Baumer工业相机堡盟工业相机如何通过BGAPI SDK转换和显示偏振相机的图像(C++)
Baumer工业相机堡盟工业相机如何通过BGAPI SDK转换和显示偏振相机的图像(C) Baumer工业相机Baumer工业相机的偏振相机的技术背景Baumer工业相机通过BGAPI SDK在回调函数里显示偏振相机的图像1.引用合适的类文件2.Baumer工业相机在BufferEvent转换并显示偏…

机器视觉工程师努力工作确实不一定涨工资,但是努力工作,确实有很大可能涨工资
机器视觉工程师努力工作确实不一定涨工资,但是努力工作,确实有很大可能涨工资 其实在我们机器视觉工程张薪资方面,正常是一年两次调整周期。
机器视觉系统选型-环形光源分类及应用场景
环形光源主要分为? 1.环形光源(高角度) 照射光线与水平方向成高角度夹角
外观缺陷检测字符识别PCB基板检测二维码读取- 2.环形光源(低角度) 照射光线与水平方向成低角度夹角各种边缘提取字符识别玻璃断面的损伤检测金属表面刻印、损伤 3.环形光源(高亮) 高亮度远…

机器视觉系统交互通讯流程
(QQ群有答疑)零基础小白快速上手海康VisionMaster开发系列课程 交互通讯流程,一般来说会有一个大致的步骤,当然我给的不是唯一的步骤,是大家比较认可的通讯交互流程,其实大家都接触过,如果交互不…
男人为什么总想搞自己的初恋-带走了我一整个青春的女孩
机器视觉海康Visionmaster-字符缺失缺陷检测 初恋,就是人生中爱情里面的第一个喜欢的人,那些曾经刻骨铭心地相爱、相知、难以忘怀地结束、回想起来还心存不甘的那段爱恋里的男女主角。
对于大多数男人来说,体会到初恋的滋润,初恋都是在比较年轻的年龄,愿意为一个女孩子做…

机器视觉检测系统的基本流程你知道吗
工业制造业种,首先我们便需要了解其基本流程,作为工厂信息科人员,我们不能只依靠视觉服务商的巡检驻检来解决问题,为了产线的效率提升,我们更多的应该培养产线技术人员,出现问题便可以最快速度解决问题&…
Baumer工业相机堡盟工业相机如何通过BGAPISDK切换数据BPP8和BPP10和BPP12格式功能(C++)
Baumer工业相机堡盟工业相机如何通过BGAPISDK切换数据BPP8和BPP10和BPP12格式功能(C) Baumer工业相机Baumer工业相机BGAPISDK和BPP数据的技术背景Baumer工业相机通过BGAPISDK使用BPP数据切换功能1.引用合适的类文件2.通过BGAPISDK使用BPP数据切换功能 Ba…

机器视觉工程师注意高新待遇来了,非标设备厂家早就布局海外市场,国内大多数企业是谋生存情况下,而更具有大局观的企业走出去则是谋发展
冬天来了,大家记得多添点衣服,记得穿秋裤!
当各个厂家都在国内抢订单的时候,更多的非标设备厂家早已走向海外,布局海外市场,或者在新的领域积极开展新的业务。为自身公司带来大量海外订单。
别的企业都是…

图像分类系列(二) VGGNet学习详细记录
经典神经网络论文超详细解读(二)——VGGNet学习笔记(翻译+精读)
前言
上一篇我们介绍了经典神经网络的开山力作——AlexNet:经典神经网络论文超详细解读(一)——AlexNet学习笔记&a…

机器视觉公司怎么可能养我这闲人,连软件加密狗都用不起,项目都用盗版,为什么?
正版价值观我是认同的,但是同行也不用软件加密狗,你让我承担过多的设备成本,终端客户不愿意承担加密狗的成本,公司更不愿意去承担,许多机器视觉公司“零元购”,机器视觉软件加密狗都用不起,项目…
Baumer工业相机堡盟工业相如何使用BGAPISDK通过两种不同的方法进行图像回调函数的使用(C#)
Baumer工业相机堡盟工业相如何使用BGAPISDK通过两种不同的方法进行图像回调函数的使用(C#) Baumer工业相机Baumer工业相机的固定帧率功能的技术背景方法一:使用BGAPI SDK里的函数在图像回调函数里完成图像数据转换方法二:使用Bitm…
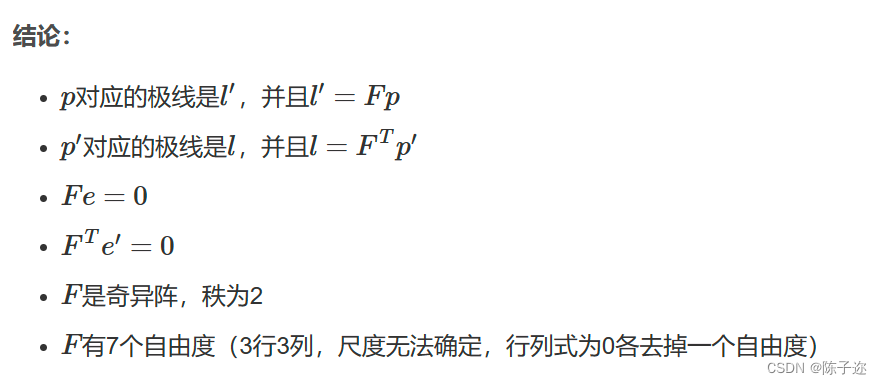
双目视觉实战---三维重建基础与极几何
目录
一,简介
二. 双视图与三角化
1. 三角化模型
2. 多视图几何的关键问题
3、极几何 三、本质矩阵
四、基础矩阵
3. 基础矩阵的作用及小结
五、基础矩阵估计 一,简介
三维重建是指通过一系列的图像或传感器数据,推导出物体或场景的…
C#(Csharp)我的基础教程(一)(我的菜鸟教程笔记)-构造方法学习与探究
目录 核心:构造方法(析构方法)、实例方法/静态方法1、构造方法(Constructor):2、构造方法的重载3、构造方法之间的调用4、静态方法 核心:构造方法(析构方法)、实例方法/静…
机器视觉工程师们职场工作现状
不在搬砖的路上,就是正在拧螺丝,当然不划水是不可能的,肯定要划水的。
现在的年轻人,大多数不想上班,因为上班真得不挣钱,据说还亏本,还有人上班还跟爸妈要钱用。
当加班变成变相剥削的时候,其实七成受访打工人要加班 ,五成的人拿不到加班费,据说用人单位给加班费不…